光电传感器
前言
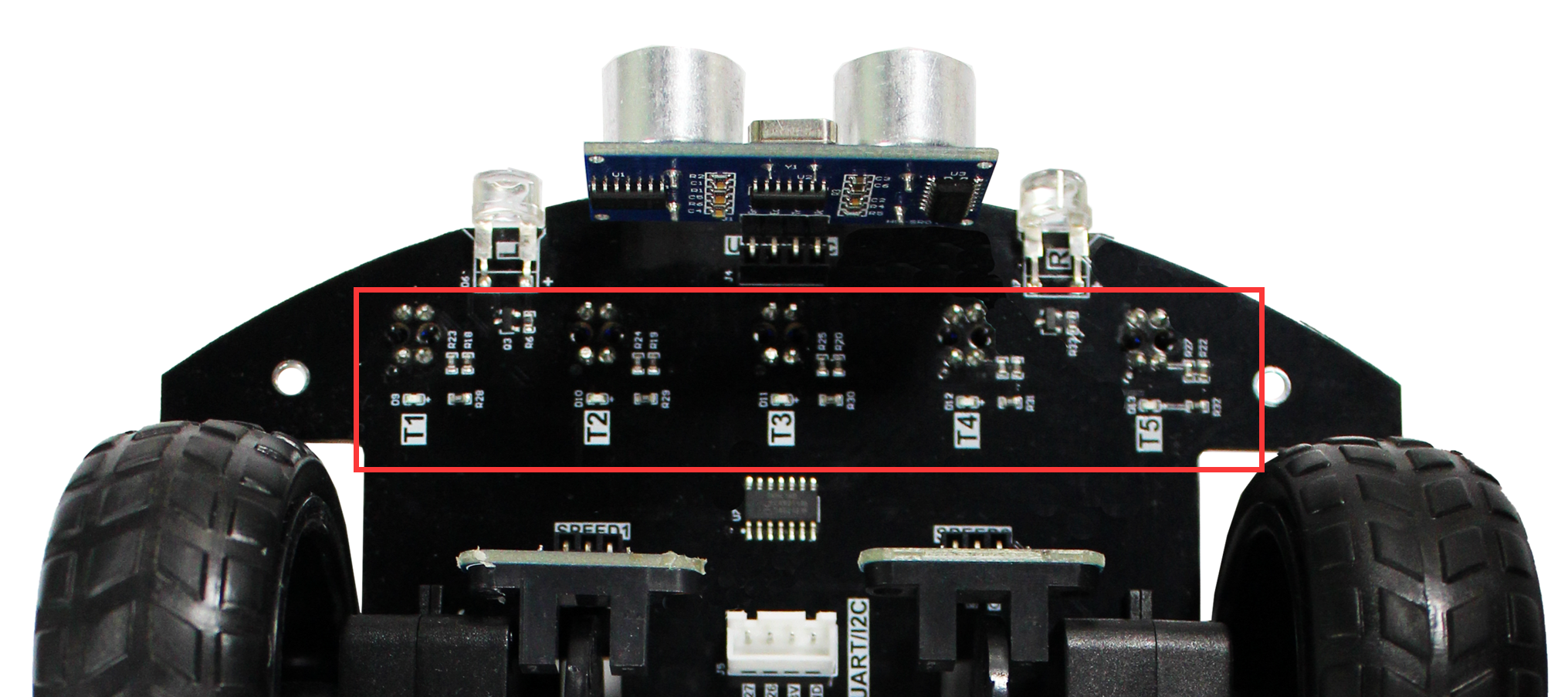
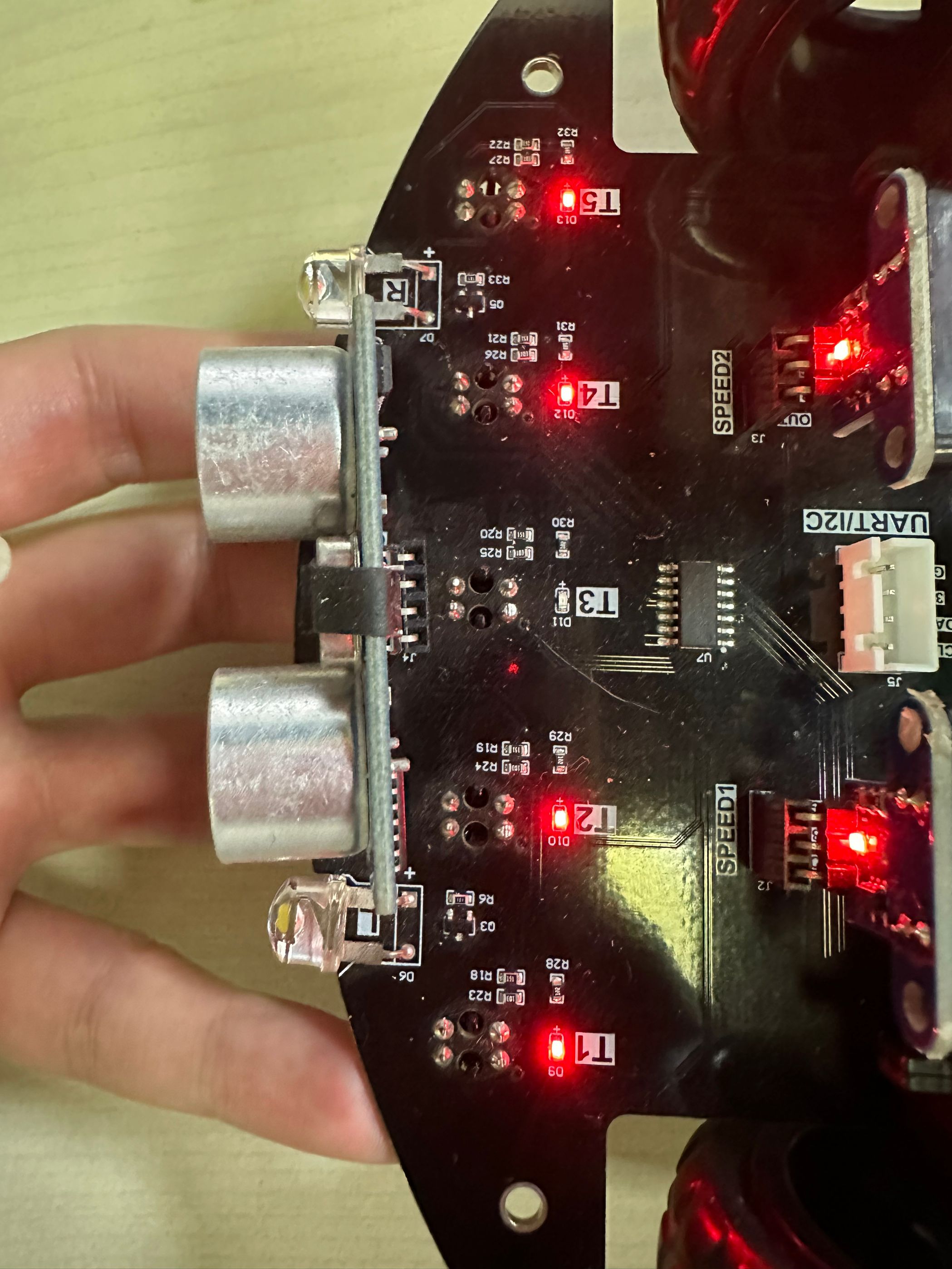
pyCar的车头下方有5路光电传感器,当车在白色路面行驶时(反光性比较好),全部指示灯熄灭,输出高电平。当遇到黑色赛道(无反光),对应的传感器指示灯亮,输出低电平。常用于巡线实验。
实验目的
编程实现光电传感器值测量。
实验讲解
光电传感器本质是判断IO口的高低电平,对象具体说明如下:
CAR对象
构造函数
Car = car.CAR()
构造pyCar对象。
使用方法
CAR.T1()
返回光电传感器T1值,布尔类型。
CAR.T2()
返回光电传感器T2值,布尔类型。
CAR.T3()
返回光电传感器T3值,布尔类型。
CAR.T4()
返回光电传感器T4值,布尔类型。
CAR.T5()
返回光电传感器T5值,布尔类型。
更多用法请阅读官方文档:https://pycar.01studio.cc/zh-cn/latest/manual/quickref.html
代码编写流程如下:
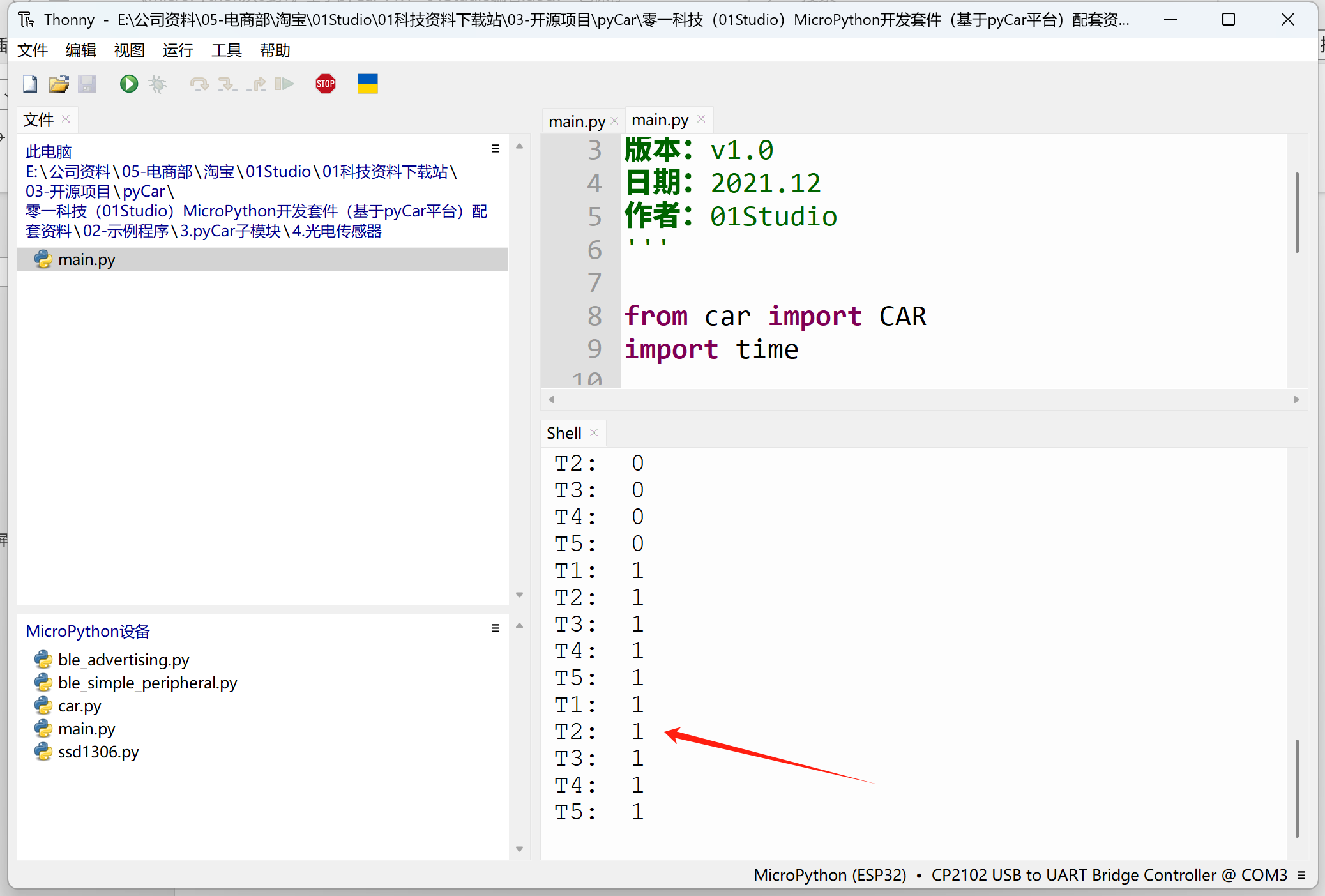
参考代码
'''
实验名称:pyCar光电传感器
版本:v1.0
作者:01Studio
'''
from car import CAR
import time
Car = CAR() #构建pyCar对象
#打印5路光电传感器状态
while True:
print('T1: ',Car.T1())
print('T2: ',Car.T2())
print('T3: ',Car.T3())
print('T4: ',Car.T4())
print('T5: ',Car.T5())
time.sleep_ms(1000)
实验结果
运行代码,可以看到终端打印5个光电传感器值。
用手遮挡传感器,可以看到值变化,小车对应的红色指示灯亮灭跟着变化。
光电传感器主要用于巡线实验,在后面综合实验中会涉及巡线小车相关内容。