四轴飞行器基础知识
前言
由于MicroPython的高度封装,底层工程师花了大量时间来优化飞控核心控制模块,而我们顶层使用起来是非常方便的。甚至只关心飞行器的一些常规动作就好。我们认为结合一些四轴飞行器的基础知识,会让大家更好的理解其工作原理。
飞行器姿态
每一个飞行器(飞机、直升机、无人机等)都有其特定的姿态,以下图为例,通过构建X、Y、Z坐标。
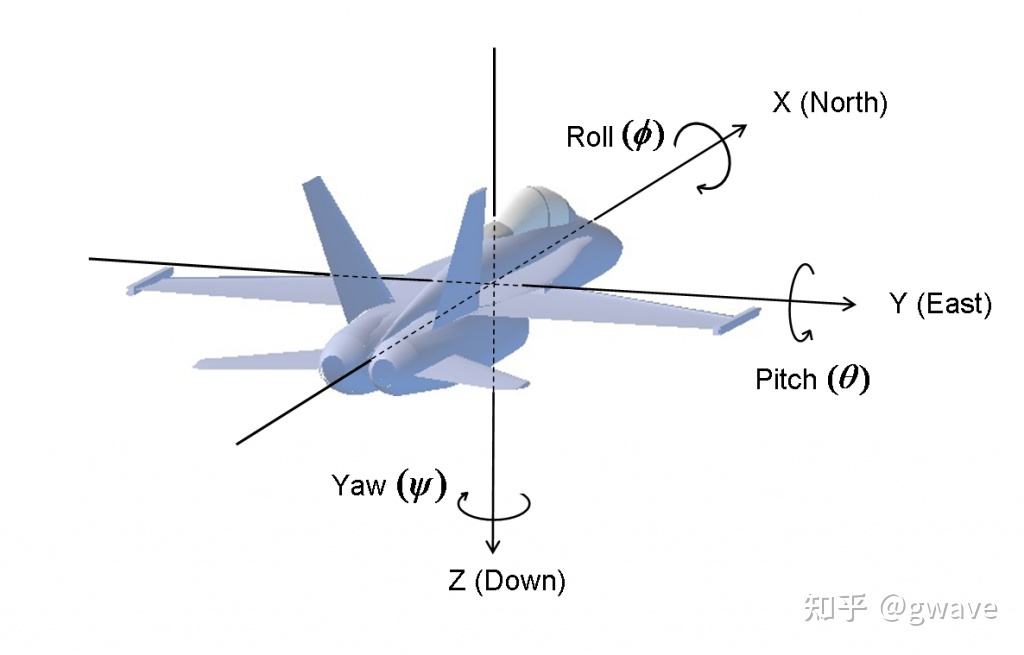
我们让飞行器沿着这个坐标轴旋转,可以得出对应的Roll(沿X轴旋转)、Pictch(沿Y轴旋转),Yaw(沿Z轴旋转),利用这3个参数就可以表示出飞行器的所有实时姿态。如下图:
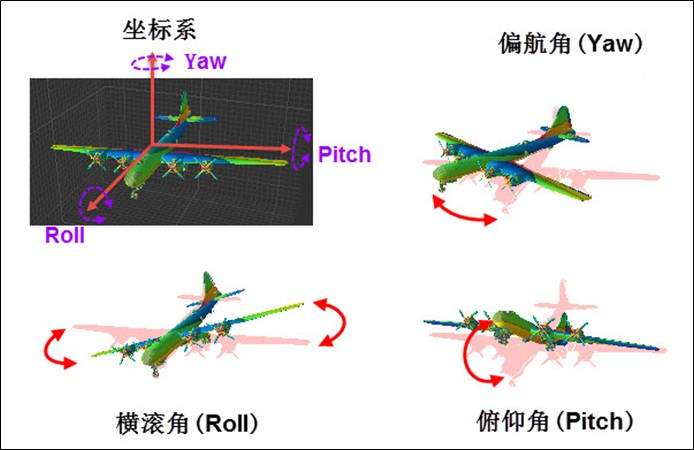
飞机在飞行过程中实时监测姿态,如果姿态偏离过大,可能导致坠毁。这些姿态信息通常会被记录在“黑匣子”,以便用于事故调查。
由于飞机没有直接向上的升力,因此起飞需要一个爬升过程,也就是我们看到为什么飞机场那么的大。
直升机飞行原理
接下来我们了解一下直升机,与飞机不同,直升机顶部有螺旋状,转动时候提供升力,可以让直升机原地起飞。

由于螺旋状转动,那么理论上会对机身产生反作用力,使得机身以相反方向旋转,那么为什么直升机可以保持机身不转动的,答案就是尾翼,尾翼通过转动产生作用力,保持了机身的稳定。
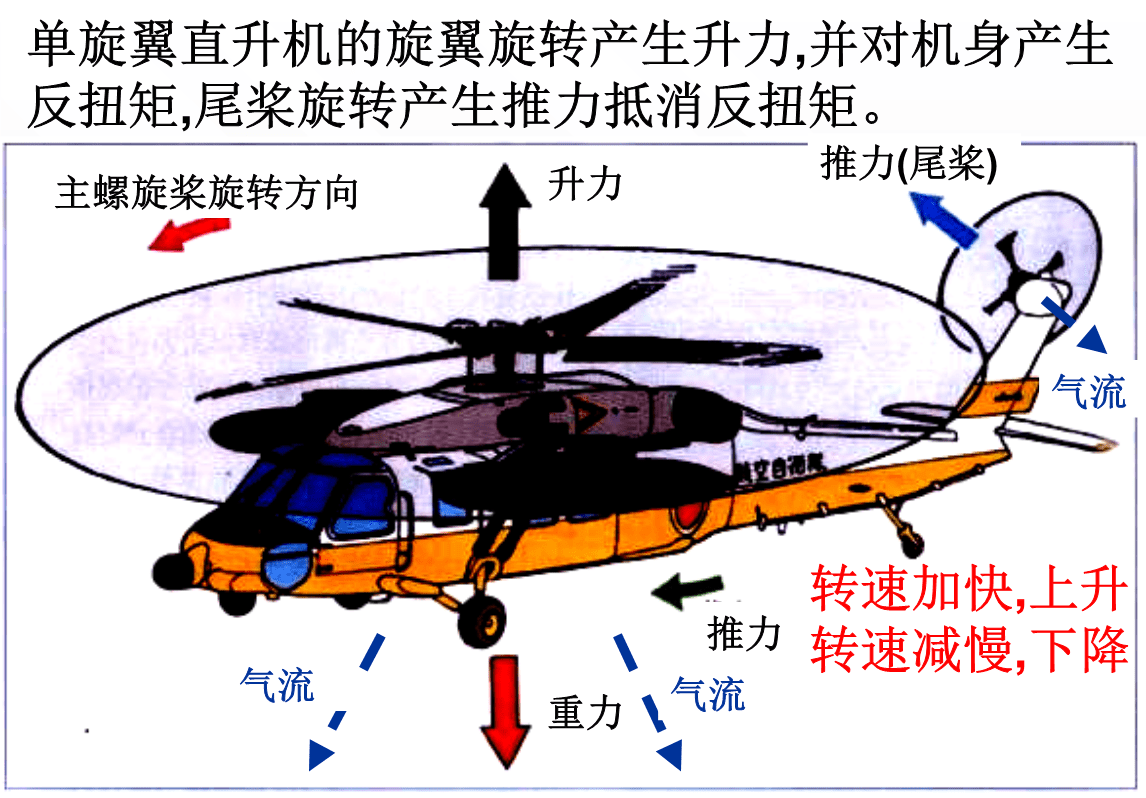
那么直升机是如何前后左右运动的呢?这里以前进为例,参考前面的坐标系,我们改变机身的俯仰角。将机身向下倾斜一点,那么螺旋转升力与重力的合力就会产生一个向前的力,使得直升机向前飞。其它运动方式原理也类似。

四轴飞行器原理
四轴的飞行原理与直升机较为接近,四轴有4个螺旋转,通常有A、B浆两类(对角线相同)。如下图为例,正上方为机头方向,左上角起逆时针依次为电机M1,M2,M3,M4。可以看到M1和M3逆时针旋转,M2和M4顺时针旋转,四轴就是通过自身4个电机的转动方向对称性来低消螺旋桨对机身的作用力。
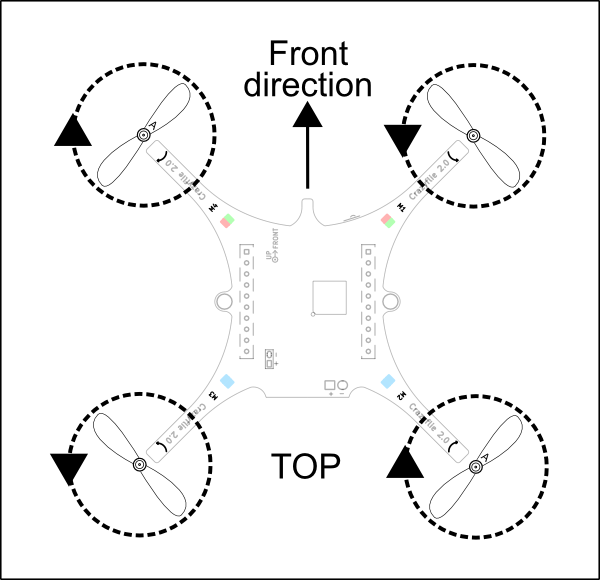
当4个螺旋桨旋转提供的升力大于四轴飞行器的重力,四轴就表现为上升。
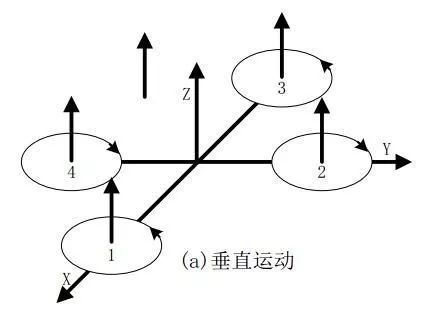
四轴飞行器内置姿态检测传感器(六轴传感器),用于实时监测其姿态,若姿态发生变化则通过控制4个电机实时调整。
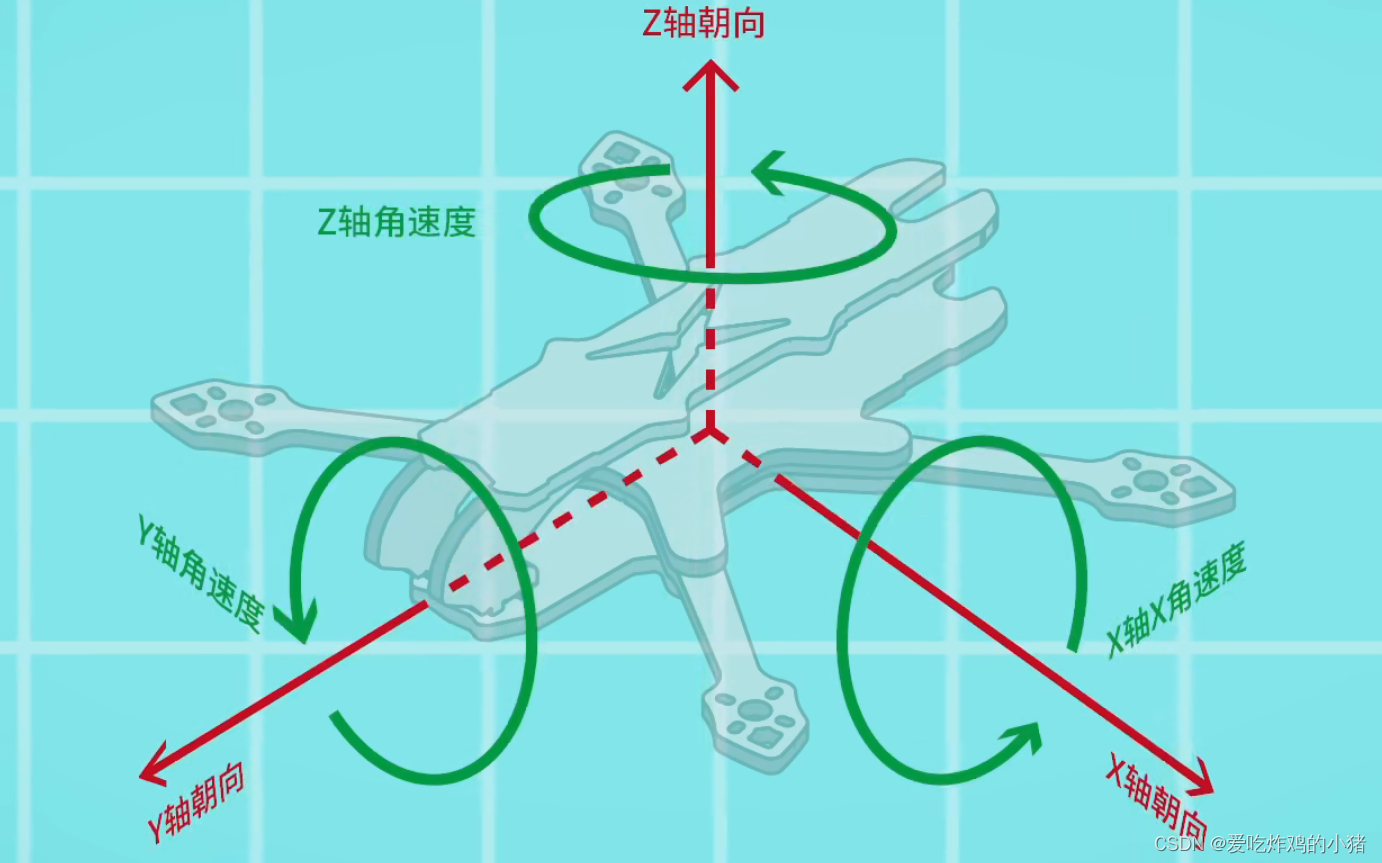
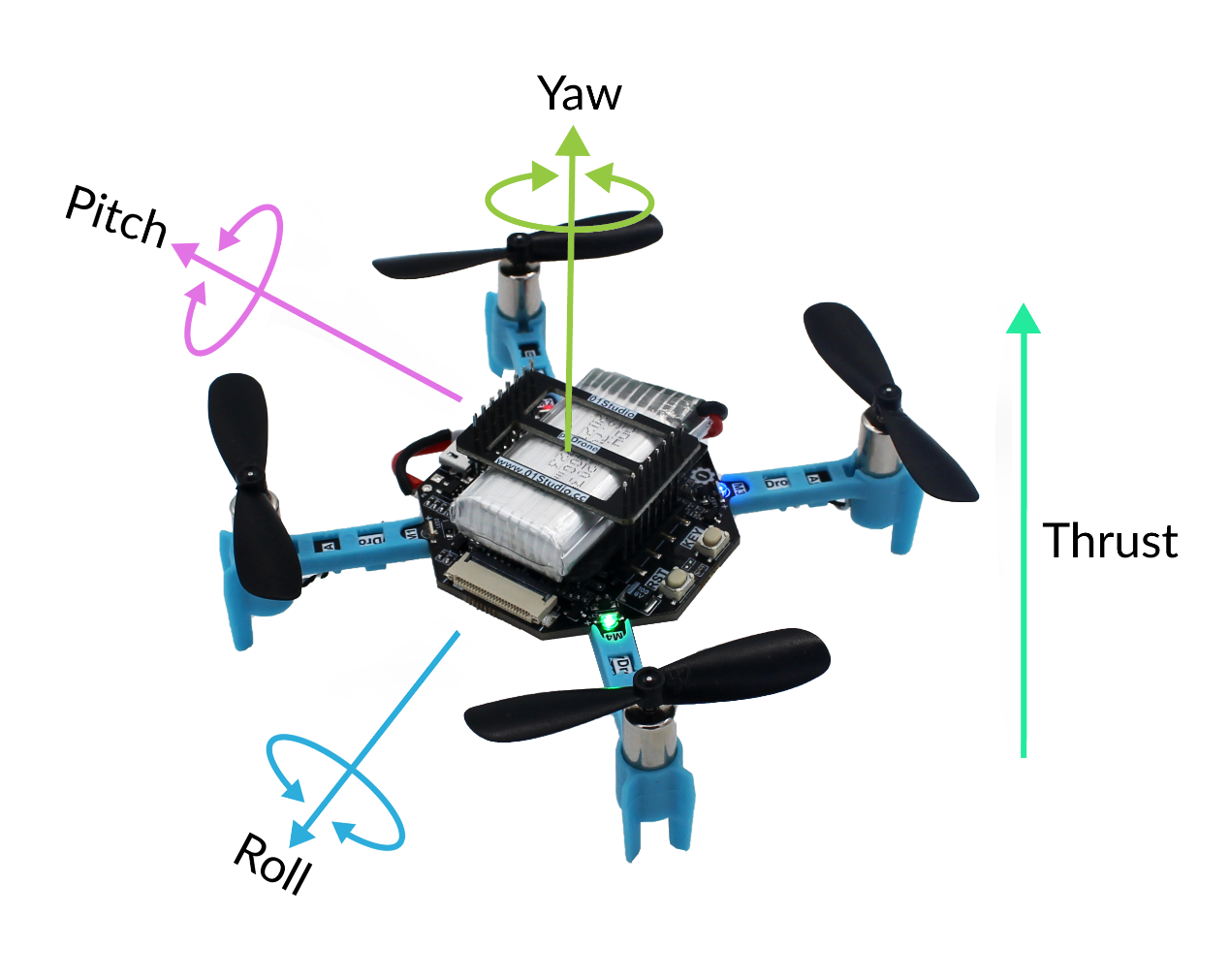
四轴通过3个姿态值Roll(沿Y轴旋转)、Pictch(沿X轴旋转),Yaw(沿Z轴旋转)姿态变化和1个抬升/下降值可实现四轴的各种运动(这里X、Y轴与前面飞机坐标系不一样,它们是可以对换的,根据传感器坐标而定)。如前后运动(改变Pitch俯仰角),左右运动(改变Roll横滚角),自转(改变YAW偏航角)。
这些变化值通常由遥控器发送,四轴飞行器接收后处理并实现相关动作。下图是pyDrone的坐标系: