蓝牙控制
前言
在上一节学习了四轴飞行器的原理后,这一节我们便直接进入编程实现pyDrone控制。四轴离不开遥控器,这里使用pyController手柄为例(手柄的摇杆比手机更有触感,体验更好),通过手柄发出信号,pyDrone接收后进行相应动作的变化。
实验平台
pyDrone和pyController手柄。


实验目的
编程实现手柄通过pyController手柄蓝牙(BLE)方式控制pyDrone。
实验讲解
关于01Studio pyController遥控/游戏手柄学习教程见:https://wiki.01studio.cc/docs/pycontroller
由于四轴飞行器对实时性要求非常高,因此核心部分在01Studio pyDrone固件底层实现,通过开放出micropython接口,让用户通过简单的python语句便可实现pyDrone四轴的各种控制。
我们先来看看pyDrone对象的构造函数和使用方法。
DRONE对象
构造函数
d = drone.DRONE(flightmode = 0)
构建pyDrone四轴对象。
flightmode飞行模式。0- 无头模式。表示以周围环境为参照系,飞行的前后左右方向跟机身无关,通常用于室内飞行 (默认模式);1- 有头模式。表示以四轴机身为参照系,飞行的前后左右方向跟机身有关。四轴自转后保持机头方向为正前方,通常用于室外飞行。
使用方法
d.read_cal_data()
获取校准数据。返回3个融合的X/Y/Z校准数据值,当3个值均少于5000时候,校准通过。
d.read_calibrated()
获取校准状态。校准通过返回1,不通过返回0。对象构建后自动开始校准,请尽量将四轴水平放置以便提高校准速度。校准时间通常在启动后10秒内完成。
d.take_off(distance = 80)
起飞。
distance起飞后悬停高度,默认80cm。可以设置范围 30-2000cm:
d.landing()
降落。四轴飞行器缓慢降落,这时候依然可以控制前后左右方向,降到地面后电机停止转动。
d.stop()
停止。所有电机立刻停止转动,用于突发情况迫降。
d.control(rol = 0, pit = 0, yaw = 0, thr = 0)
四轴飞行器姿态控制:
rolRoll横滚角,控制四轴左右运动。范围: -100 ~ 100 ,“-”表示左,正表示右,绝对值越大,角度/油门越大。pitPitch俯仰角,控制四轴前后运动。范围: -100 ~ 100 ,“-”表示后,正表示前,绝对值越大,角度/油门越大。yawYaw偏航角,控制四轴自转运动。范围: -100 ~ 100 ,“-”表示逆时针自转,正表示顺时针自转,绝对值越大,角度/油门越大。thrThrust推力,控制四轴上下运动。范围: -100 ~ 100 ,“-”表示下降,正表示抬升,绝对值越大,油门越大。
d.read_states()
读取四轴飞行器状态信息。返回9个数据的元组。
1、 roll值,范围[-18000 ~ 18000 ] ,角度放大100倍。
2、 pitch值,范围[-18000 ~ 18000 ] ,角度放大100倍。
3、 yaw值,范围[-18000 ~ 18000 ] ,角度放大100倍。
4、 遥控器 roll 控制量,范围[-1000 ~ 1000 ]
5、 遥控器 pitch控制量,范围[-1000 ~ 1000 ]
6、 遥控器 yaw 控制量,范围[-200 ~ 200 ]
7、 遥控器 Thrust控制量,范围[0 ~ 100 ] ,百分比,摇杆回中时候约为50,即50%。
8、 电池电量,单位10mV。
9、 相对高度,单位cm(与校准时候的相对高度)。
ESP32-S3固件集成了BLE库,支持低功耗蓝牙(BLE)主从机功能。关于BLE的应用细节不会在本节内容展开,这里我们只需要搞清楚主机(central)和从机(peripheral)的概念区别即可,蓝牙设备在连接过程如下:
从机发起广播 –> 主机搜索广播的设备 –> 发起连接 –> 连接成功后通讯
一般来说子设备通常作为从机,控制设备作为主机,比如我有一个蓝牙耳机(从机),开机后发起广播,而手机(主机)在搜索,搜索到这个蓝牙耳机后就发起连接,连接成功后相互通讯。
本节中,我们将四轴设定从机,上电后发出广播,广播名称设为“pyDrone”,然后pyController手柄作为主机,上电后不断搜索周围的四轴设备,搜索后发起连接,连接成功后将手柄摇杆和按键原始数据发送给pyDrone,pyDrone接收到数据后执行各种飞行动作。
结合上述讲解,总结出代码编写流程图如下:
参考代码
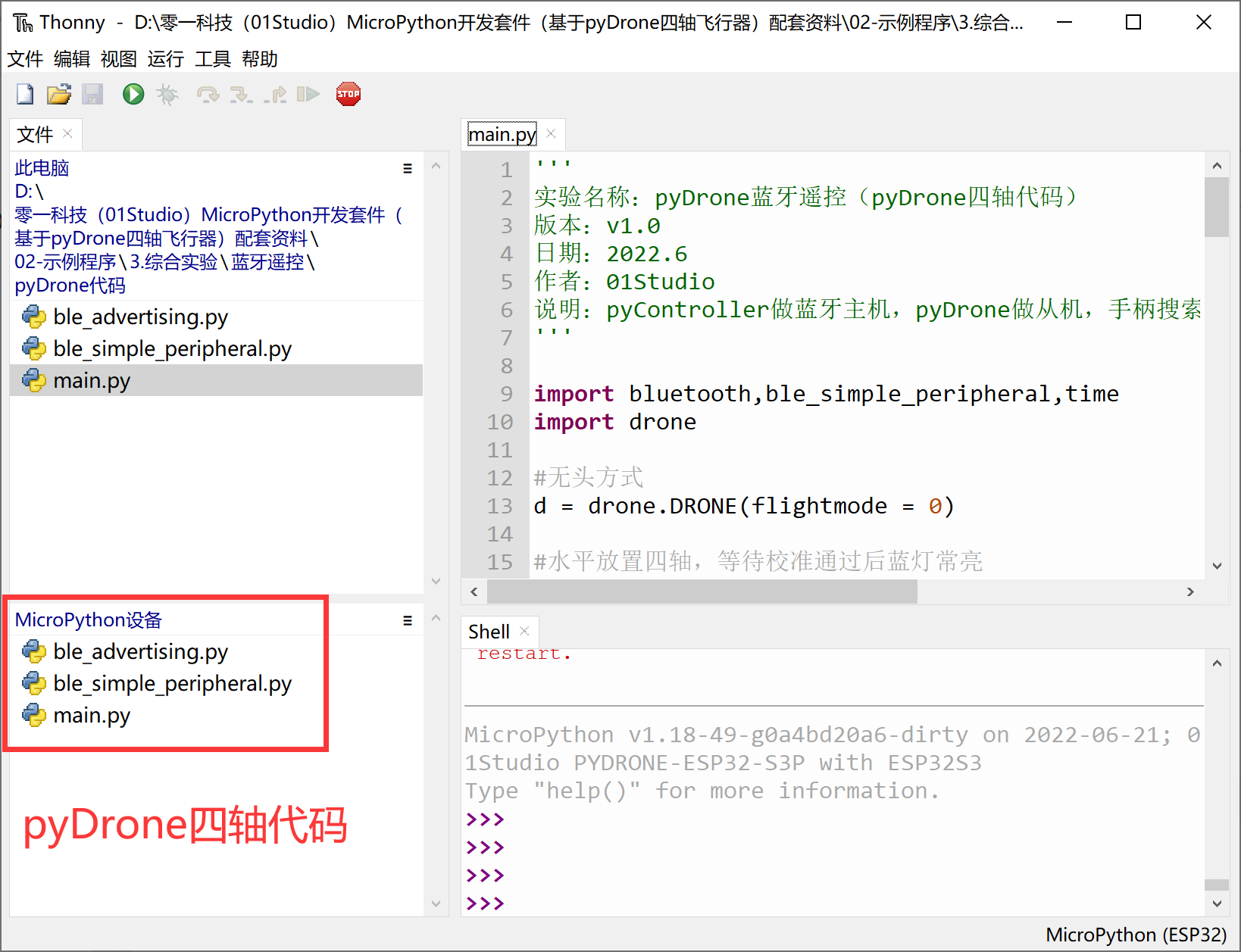
pyDrone四轴(蓝牙从机)代码
main.py代码
'''
实验名称:pyDrone蓝牙遥控(pyDrone四轴代码)
版本:v1.0
日期:2022.6
作者:01Studio
说明:pyController做蓝牙主机,pyDrone做从机,手柄搜索到'pyDrone'后发起连接,然后控制。
'''
import bluetooth,ble_simple_peripheral,time
import drone
#无头方式
d = drone.DRONE(flightmode = 0,debug =1)
#水平放置四轴,等待校准通过后蓝灯常亮
while True:
#打印校准信息,当返回3个值均少于5000时校准通过。
print(d.read_cal_data())
#校准通过
if d.read_calibrated():
print(d.read_cal_data())
break
time.sleep_ms(100)
#初始化蓝牙BLE从机,广播名称为pyCar
ble = bluetooth.BLE()
p = ble_simple_peripheral.BLESimplePeripheral(ble,name='pyDrone')
#接收到蓝牙数据处理函数
def on_rx(text):
control_data = [None]*4
#接收的蓝牙数据
#print("RX:", text)
#对收到的手柄8字节数据进行判断
for i in range(len(text)):
print(i,text[i])
#将摇杆值转化为飞控控制值。
for i in range(4):
if 100 < text[i+1] < 155 :
control_data[i] = 0
elif text[i+1] <= 100 :
control_data[i] = text[i+1] - 100
else:
control_data[i] = text[i+1] - 155
print('control:',control_data)
#rol:[-100:100],rol:[-100:100],yaw:[-100:100],thr:[-100:100]
d.control(rol = control_data[0], pit = control_data[1], yaw = control_data[2], thr = control_data[3])
#检测X/Y/A/B按键
if text[5] == 24: #Y键按下
print('Y')
#起飞,起飞后120cm位置悬停。distance范围:30~2000 cm
d.take_off(distance = 120)
if text[5] == 72: #A键按下
print('A')
#降落,允许control
d.landing()
if text[5] == 40: #B键按下,可以自己添加功能。
print('B')
if text[5] == 136: #X键按下,紧急停止
print('X')
#降落,不允许control
d.stop()
states = d.read_states()
print('states: ',states)
state_buf = [None]*18
for i in range(9):
for j in range(2):
if j == 0:
state_buf[i*2+j] = int((states[i]+32768)/256)
else:
state_buf[i*2+j] = int((states[i]+32768)%256)
p.send(bytes(state_buf)) #蓝牙回传数据
#注册从机接收回调函数,收到数据会进入on_rx函数。
p.on_write(on_rx)
#系统会自动广播, 连接断开后重新自动广播。
# while True:
#
# time.sleep_ms(200)
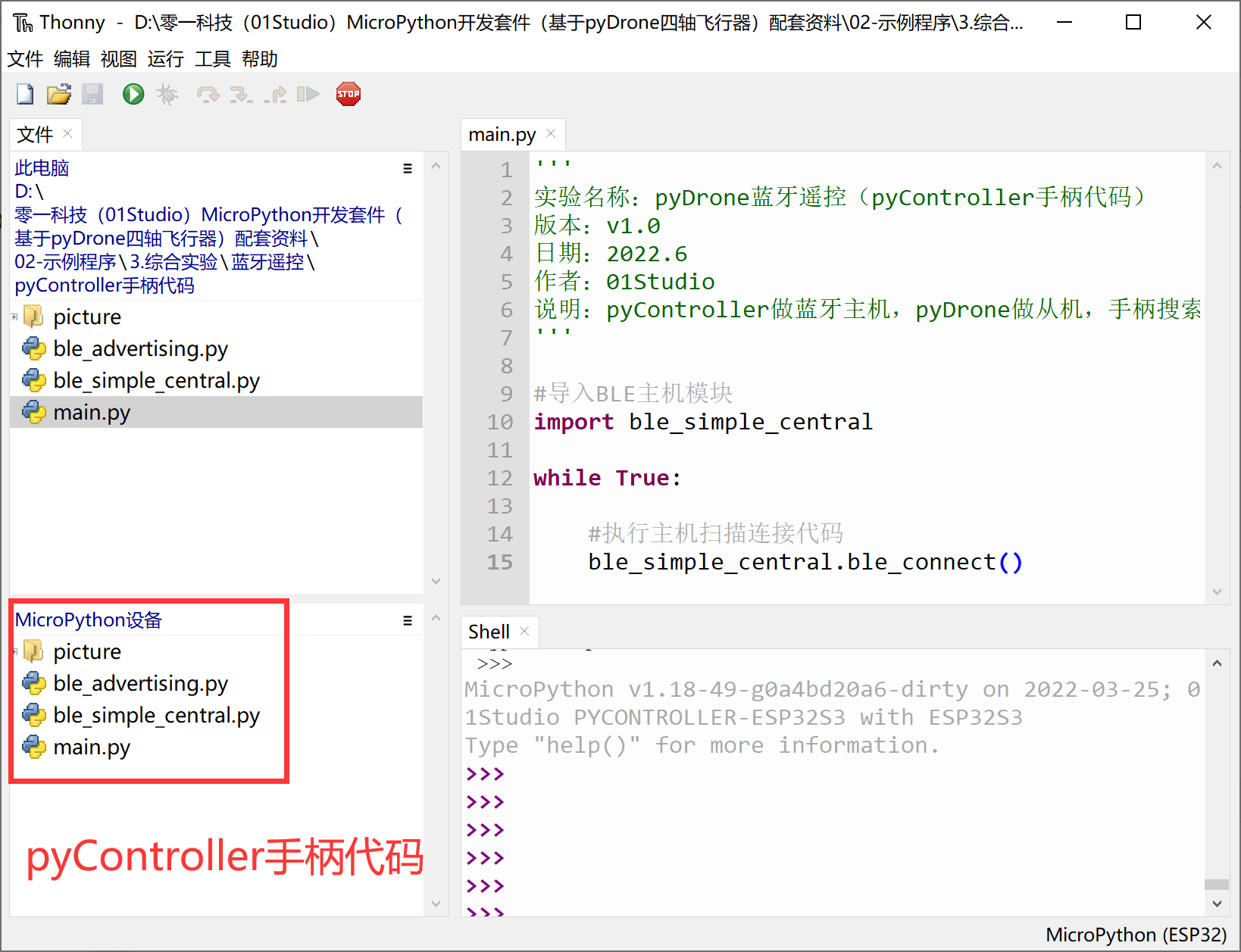
pyController遥控手柄(蓝牙主机)代码
main.py代码
'''
实验名称:pyDrone蓝牙遥控(pyController手柄代码)
版本:v1.0
日期:2022.6
作者:01Studio
说明:pyController做蓝牙主机,pyDrone做从机,手柄搜索到'pyDrone'后发起连接,然后控制。
'''
#导入BLE主机模块
import ble_simple_central
while True:
#执行主机扫描连接代码
ble_simple_central.ble_connect()
ble_simple_central.py关键代码:
...
#扫描连接函数
def ble_connect():
ble = bluetooth.BLE()
central = BLESimpleCentral(ble)
not_found = False
def on_scan(addr_type, addr, name):
if addr_type is not None:
print("Found peripheral:", addr_type, addr, name)
central.connect()
else:
global not_found
not_found = True
print("No peripheral found.")
central.scan(callback=on_scan)
# Wait for connection...
while not central.is_connected():
time.sleep_ms(100)
if not_found:
break
print("Connected")
#接收信息处理
def on_rx(v):
#print("RX", len(v))
state_buf = [None]*9
#解码接收到的9个数据
for i in range(9):
state_buf[i] = v[i*2]*256+v[i*2+1] - 32768
print(state_buf)
#飞控姿态 ROL、PIT、YAW数据显示。
l.printStr('ROL: '+str('%.2f'%(state_buf[0]/100))+' ',10,10,color=BLACK,size=2)
l.printStr('PIT: '+str('%.2f'%(state_buf[1]/100))+' ',10,40,color=BLACK,size=2)
l.printStr('YAW: '+str('%.2f'%(state_buf[2]/100))+' ',10,70,color=BLACK,size=2)
#遥控器控制量显示 ROL、PIT、YAW、THRUST
l.printStr('ROL: '+str(int(state_buf[3]/10))+' ',10,110,color=BLUE,size=2)
l.printStr('PIT: '+str(int(state_buf[4]/10))+' ',130,110,color=BLUE,size=2)
l.printStr('YAW: '+str(int(state_buf[5]/200))+' ',10,140,color=BLUE,size=2)
l.printStr('THR: '+str(state_buf[6]*2-100)+' ',130,140,color=BLUE,size=2)
#四轴相对高度
l.printStr('ALT: ' + str('%.2f'%(state_buf[8]/100))+' M ',10,180,color=DEEPGREEN,size=2)
#电池电量显示,低于3.1V表示低电量,红色字体显示。
if state_buf[7] > 310 :
l.printStr('BAT: '+str('%.2f'%(state_buf[7]/100))+' V ',10,210,color=DEEPGREEN,size=2)
else: #低电量
l.printStr('BAT: '+str('%.2f'%(state_buf[7]/100))+' V (LOW)',10,210,color=RED,size=2)
central.on_notify(on_rx)
with_response = False
while central.is_connected():
try:
a = gamepad.read() #读取手柄数据
#print("TX", a) #打印手柄原始数据
central.write(bytes(a), with_response) #发送手柄数据
except:
print("TX failed")
time.sleep_ms(400 if with_response else 50) #50ms发送一次
print("Disconnected")
...
实验结果
将示例程序--综合实验--蓝牙遥控的所有库代码文件分别发送到pyController和pyDrone。
给四轴接上电池,水平放置(务必水平放置,否则校准不通过),然后按一下复位键。

等待校准,通常在10秒内可以完成校准。校准过程蓝灯闪亮,校准通过后蓝灯常亮。

然后启动手柄,可以看到搜索到pyDrone,信息包含mac地址和信号强度。(支持多台pyDrone同时搜索)。

信号强的范围是 0 ~ -99, 值越接近0表示信号越好。

如果搜索到多台,可以通过按手柄的上、下键来选择,长按START键即可连接pyDrone。
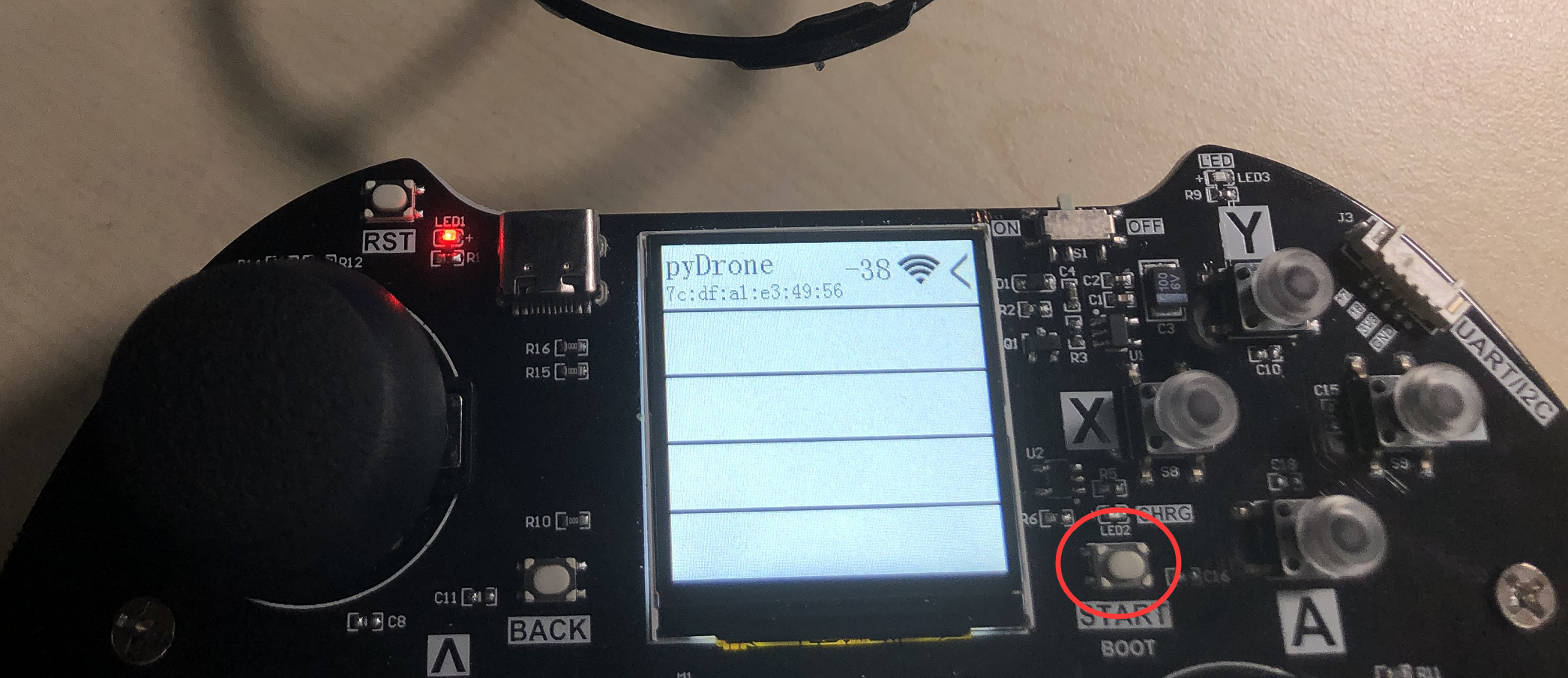
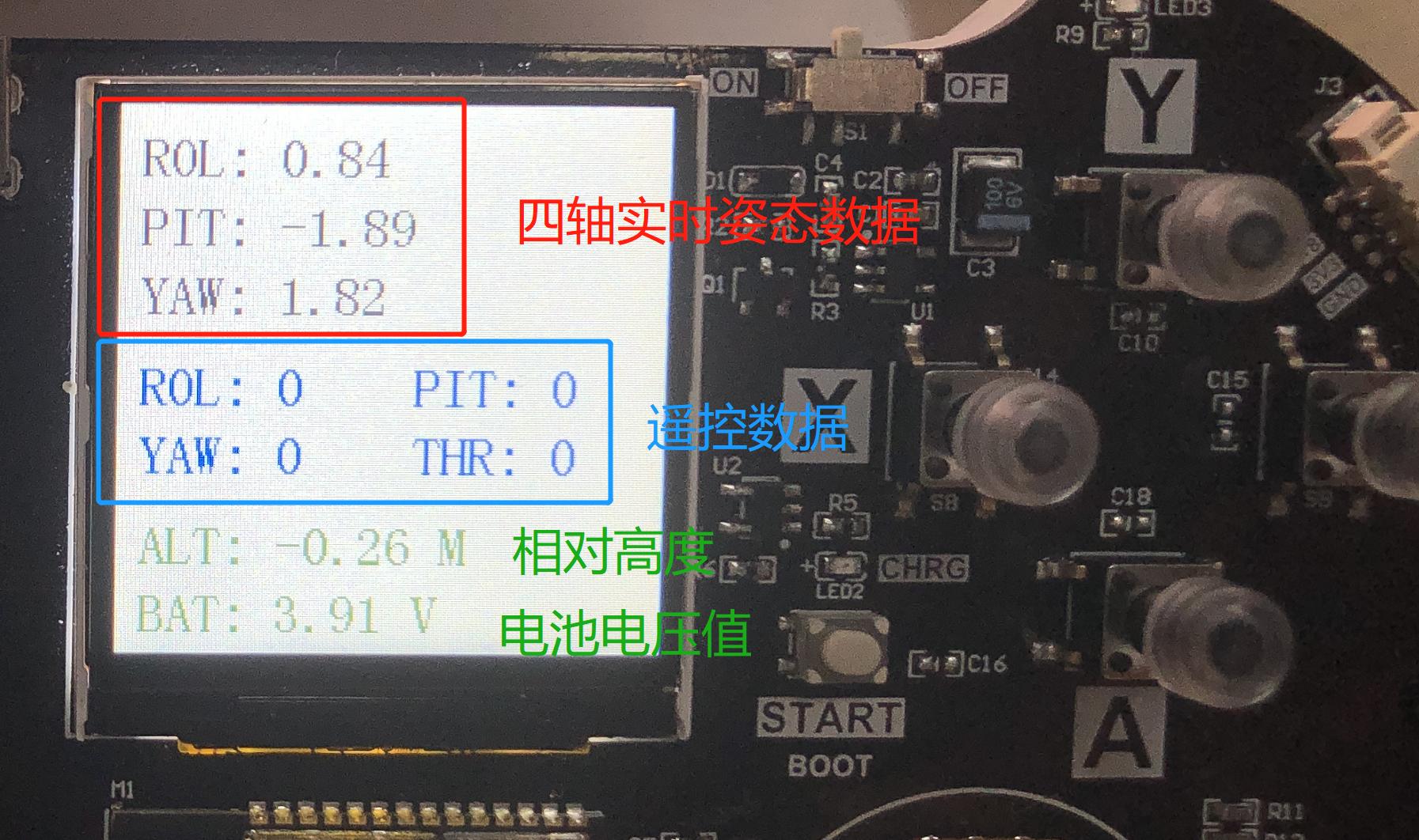
四轴的绿灯常亮表示成功连接,连接成功后手柄显示屏出现pyDrone发送的实时信息界面。

从上到下分别是四轴姿态数据、遥控器数据、相对高度、电池电压值(飞行时低于3.1V为低电量)。
这时候即可遥控四轴。手柄控制说明如下:
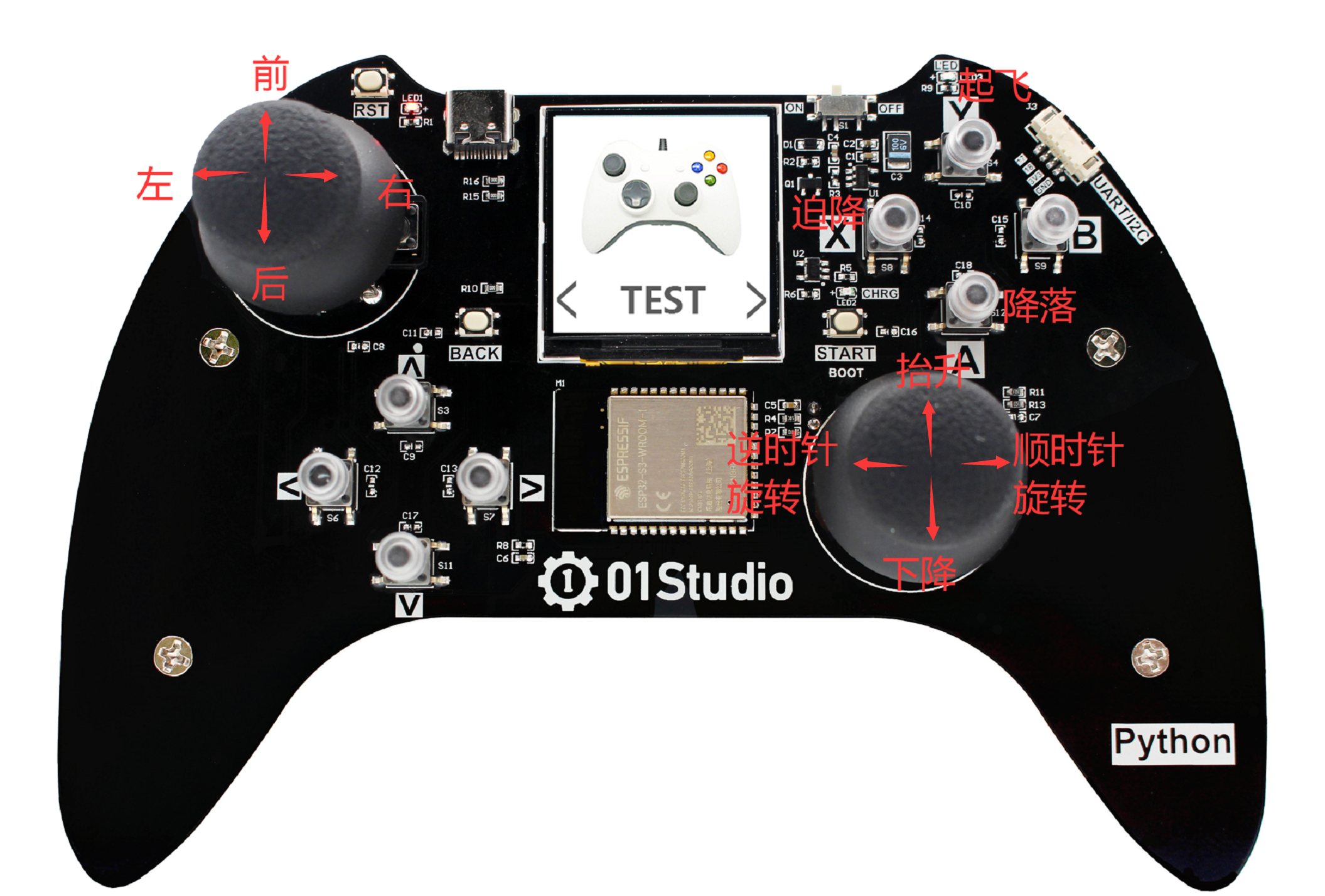
摄像头接口方向为机头方向。

先按“Y”键起飞,待抬升到一定高度后即可通过手柄进行各种飞行动作控制。需要降落时候按“A”键,四轴缓缓下降,这时候可以通过控制方向键将四轴降落到指定位置。
当四轴飞行器与地面夹角大于60°会判断为失控,电机立即停转。
遇到突发情况时候可以按下“X”键,电机会立即停止转动。
总结:四轴飞行器对控制实时性要求非常高,通过micropython封装后使用变得非常简单易用。而且可完成各类飞行动作。使用蓝牙遥控的优势是低功耗,连接简单。