AprilTag标签识别
前言
AprilTag是一种视觉基准系统,可用于多种任务,包括增强现实、机器人和相机校准。可以通过普通打印机创建目标,AprilTag 检测软件可以计算标签相对于相机的精确3D位置、方向和标识。
AprilTag官网介绍:https://april.eecs.umich.edu/software/apriltag.html
实验目的
编程实现AprilTag标记识别,并将识别到的信息通过串口终端打印出来。
实验讲解
AprilTag种类
可以将AprilTag简单地理解为一个特定信息的二维码,有family和ID两个概念:
TAG16H5→ 0 to 29TAG25H7→ 0 to 241TAG25H9→ 0 to 34TAG36H10→ 0 to 2319TAG36H11→ 0 to 586 (CanMV K210推荐使用)ARTOOLKIT→ 0 to 511
以【TAG36H11 → 0 to 586】为例,family信息就是:TAG36H11 , ID可以是“0 到 586” ,也就是一共有587种标记码。
不同家族区别:TAG16H5的有效区域是 4x4 的方块,那么它比TAG36H11看的更远(因为他有 6x6 个方块)。 但是内容少,所以TAG16H5的错误率比TAG36H11 高很多,因为TAG36H11的校验信息多。CanMV K210推荐使用TAG36H11家族的标记码。
AprilTag生成
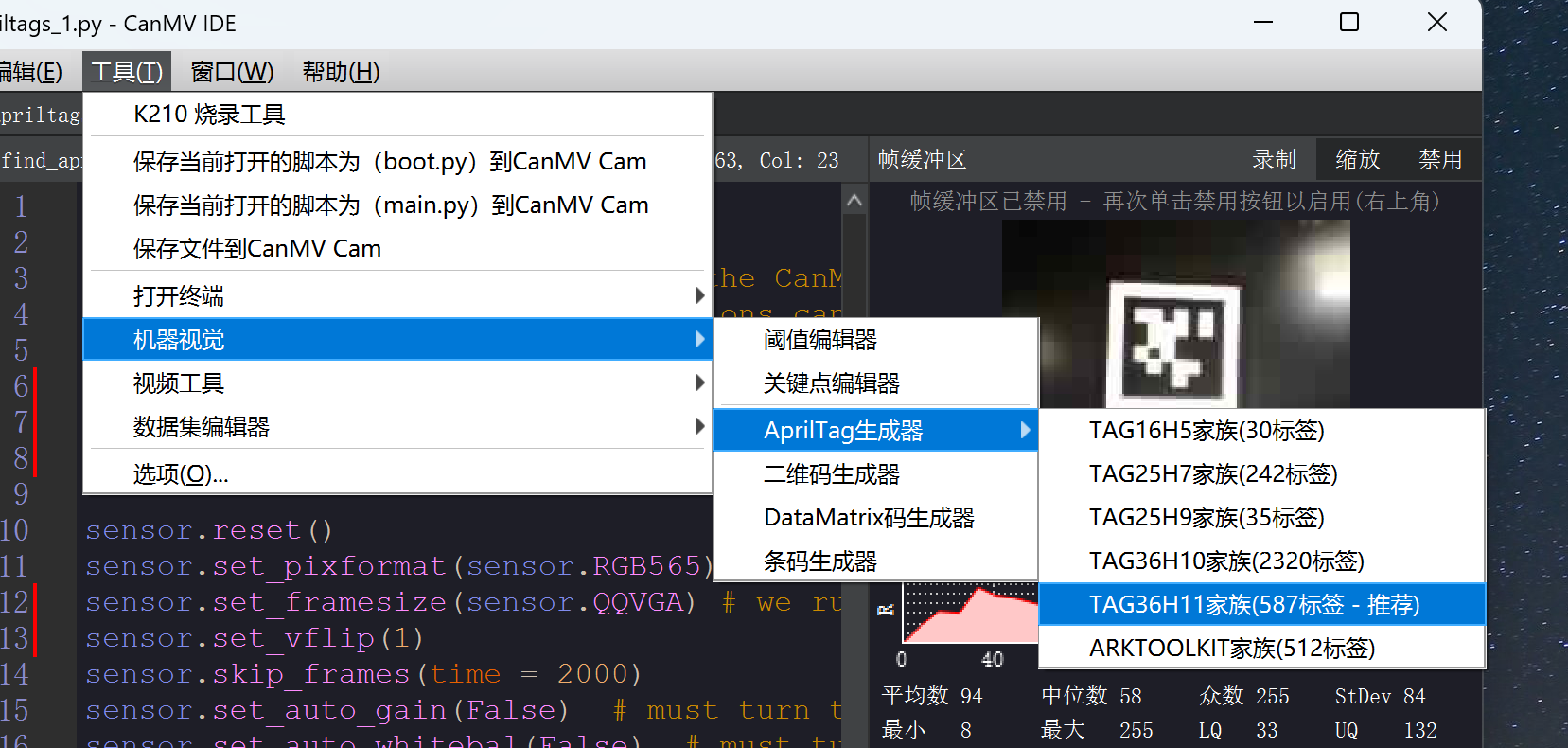
可以在CanMV IDE生成AprilTag。点击工具--机器视觉--AprilTag生成器--TAG36H11家族:
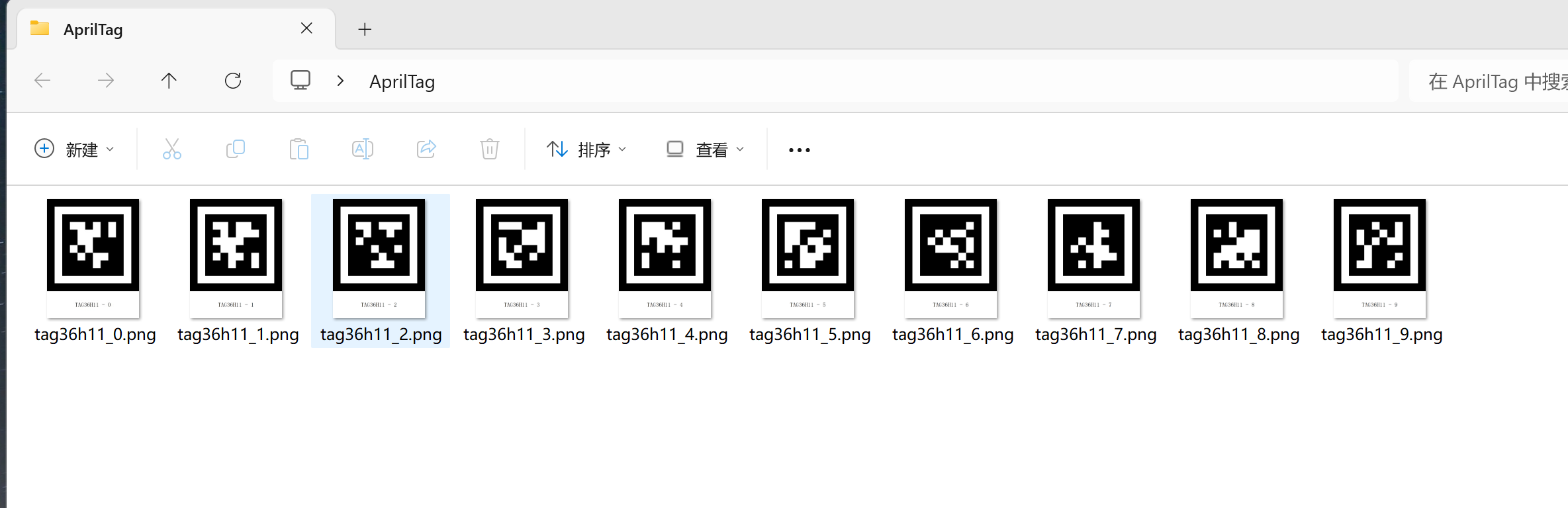
最小输入0 ,最大输入9 ,制作id从0-9共10张标签。
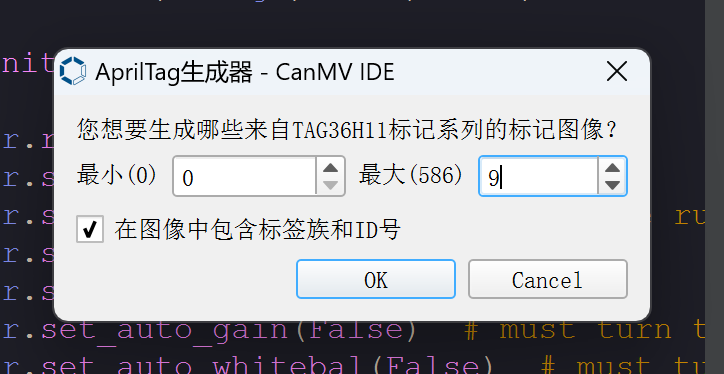
点击OK后选择要生成的位置文件夹即可:
find_apriltags对象
识别apriltag使用find_apriltags对象函数,具体说明如下:
构造函数
image.find_apriltags([roi[, families=image.TAG36H11[, fx[, fy[, cx[, cy]]]]]])
查找roi区域内的所有apriltags并返回一个image.apriltags的对象列表。
使用方法
以上函数返回image.apriltags 对象列表。
tag.rect()
返回一个矩形元组(x,y,w,h),二维码的边界。可以通过索引[0-3]来获得单个值。
tag.cx()
返回中心x坐标。
tag.cy()
返回中心y坐标
tag.family()
家族信息。
tag.id()
ID信息。
tag.rotation()
方向。
代码编写流程如下图所示:
参考代码
# AprilTags 示例
#
# 此示例显示了如何在CanMV上是被AprilTags
import sensor, image, time, math, lcd
lcd.init()
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA) # 如果分辨率更大,我们的内存会耗尽...
sensor.set_vflip(1) #摄像头后置模式
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # 必须关闭此功能,以防止图像冲洗…
sensor.set_auto_whitebal(False) # 必须关闭此功能,以防止图像冲洗…
clock = time.clock()
# 注意!与find_qrcodes不同,find_apriltags方法不需要对图像进行镜头校正
# apriltag代码最多支持可以同时处理6种tag家族。
# 返回的tag标记对象,将有其tag标记家族及其在tag标记家族内的id。
tag_families = 0
tag_families |= image.TAG16H5 # 注释掉,禁用这个家族
tag_families |= image.TAG25H7 # 注释掉,禁用这个家族
tag_families |= image.TAG25H9 # 注释掉,禁用这个家族
tag_families |= image.TAG36H10 # 注释掉,禁用这个家族
tag_families |= image.TAG36H11 # 注释掉以禁用这个家族(默认家族)
tag_families |= image.ARTOOLKIT # 注释掉,禁用这个家族
#标签系列有什么区别? 那么,例如,TAG16H5家族实际上是一个4x4的方形标签。
#所以,这意味着可以看到比6x6的TAG36H11标签更长的距离。
#然而,较低的H值(H5对H11),意味着4x4标签的假阳性率远高于6x6标签。
#所以,除非你有理由使用其他标签系列,否则使用默认族TAG36H11。
def family_name(tag):
if(tag.family() == image.TAG16H5):
return "TAG16H5"
if(tag.family() == image.TAG25H7):
return "TAG25H7"
if(tag.family() == image.TAG25H9):
return "TAG25H9"
if(tag.family() == image.TAG36H10):
return "TAG36H10"
if(tag.family() == image.TAG36H11):
return "TAG36H11"
if(tag.family() == image.ARTOOLKIT):
return "ARTOOLKIT"
while(True):
clock.tick()
img = sensor.snapshot()
for tag in img.find_apriltags(families=tag_families): # 如果没有给出家族,默认TAG36H11。
img.draw_rectangle(tag.rect(), color = (255, 0, 0))
img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0))
print_args = (family_name(tag), tag.id(), (180 * tag.rotation()) / math.pi) #打印标签信息
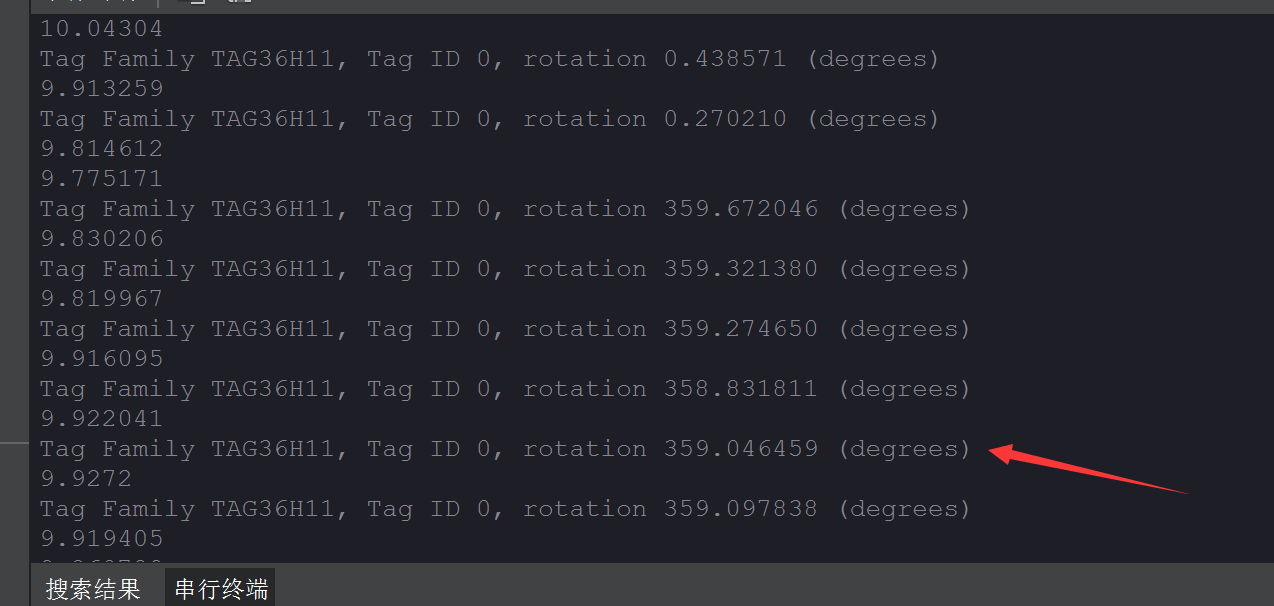
print("Tag Family %s, Tag ID %d, rotation %f (degrees)" % print_args)
lcd.display(img) #LCD显示
print(clock.fps())
实验结果
为了更好地识别,图像上apriltag需比较平展,不能太小。使用显示屏的话不能太暗。目前只支持QQVGA分辨率。
这里打开family: TAG36H11 , id: 0的标签图片测试:

运行程序,将摄像头正对标签,可以看到识别出来:

IDE串口终端显示识别结果: