物体计数(相同颜色)
前言
通过上一节颜色识别我们看到可以识别出色块的数量,这节我们就基于上一节颜色识别来学习如何识别指定颜色的物体,计算其数量。
实验目的
通过编程实现CanMV K230识别程序预先设定的颜色,计算物体的数量。
实验讲解
find_blobs用法在上一节颜色识别已经讲解过,这里重复一下。主要是基于LAB颜色模型(每个颜色都是用一组LAB阈值表示,有兴趣的用户可以自行查阅相关模型资料)。其位于image模块下,因此我们直接将拍摄到的图片进行处理即可,那么我们像以往一样像看一下本实验相关对象和函数说明,具体如下:
find_blobs对象
构造函数
image.find_blobs(thresholds[, invert=False[, roi[, x_stride=2[, y_stride=1[, area_threshold=10
[, pixels_threshold=10[, merge=False[, margin=0[, threshold_cb=None[,
merge_cb=None]]]]]]]]]])
查找图像中指定的色块。返回image.blog对象列表;参数说明:
thresholds: 必须是元组列表。 [(lo, hi), (lo, hi), ..., (lo, hi)] 定义你想追踪的颜色范围。 对于灰度图像,每个元组需要包含两个值 - 最小灰度值和最大灰度值。 仅考虑落在这些阈值之间的像素区域。 对于RGB565图像,每个元组需要有六个值(l_lo,l_hi,a_lo,a_hi,b_lo,b_hi) - 分别是LAB L,A和B通道的最小值和最大值。area_threshold: 若色块的边界框区域小于此参数值,则会被过滤掉;pixels_threshold: 若色块的像素数量小于此参数值,则会被过滤掉;merge: 若为True,则合并所有没有被过滤的色块;margin: 调整合并色块的边缘。
使用方法
以上函数返回image.blob对象列表。
blob.rect()
返回一个矩形元组(x,y,w,h),如色块边界。可以通过索引[0-3]来获得这些值。
blob.cx()
返回色块(int)的中心x位置。可以通过索引[5]来获得这个值。
blob.cy()
返回色块(int)的中心y位置。可以通过索引[6]来获得这个值。
更多用法请阅读官方文档:
https://developer.canaan-creative.com/k230_canmv/main/zh/api/openmv/image.html#find-blobs
获取颜色阈值
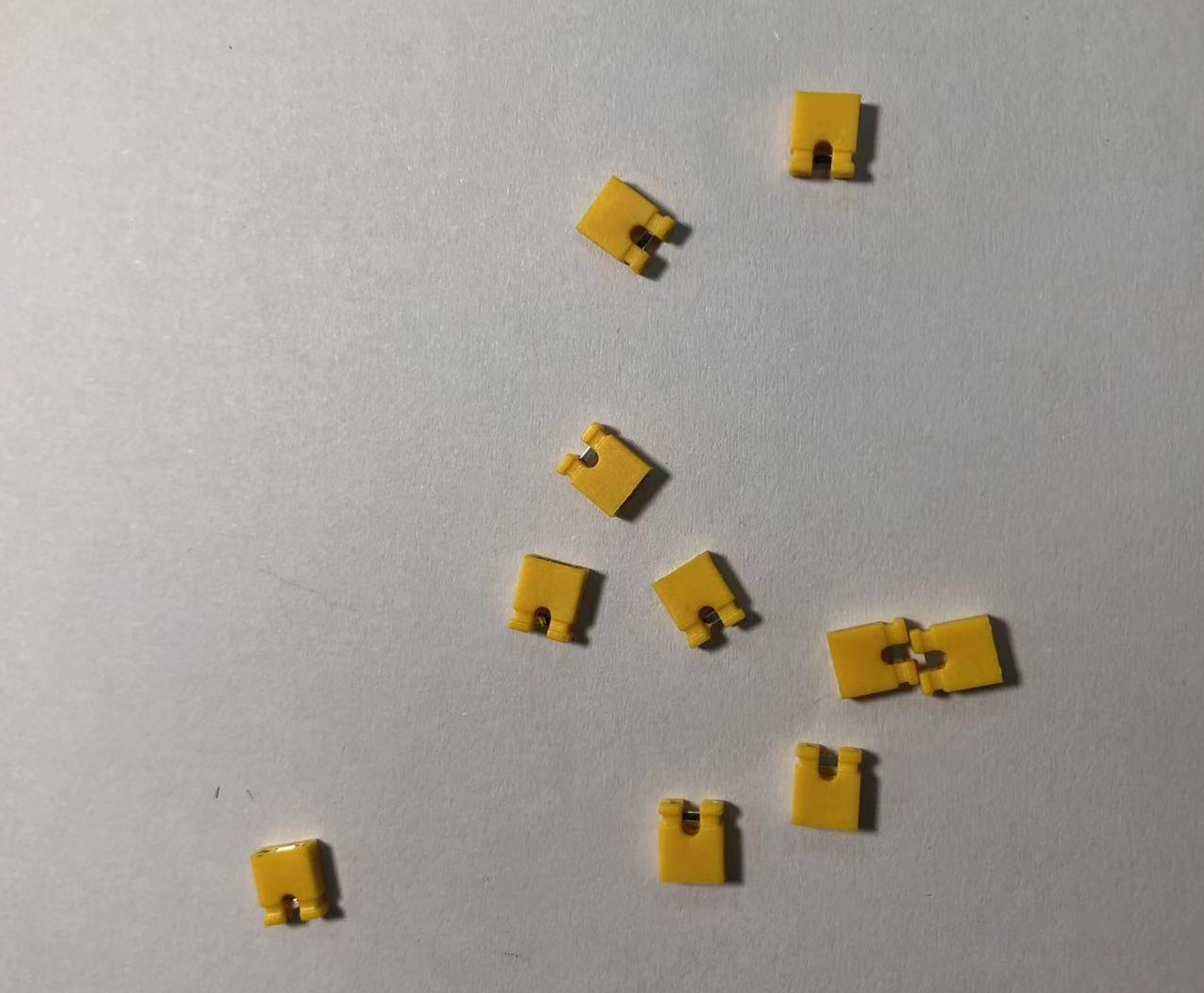
针对不同颜色的物体我们如何获取它的阈值呢?这里以黄色的跳线帽为例来讲解。
先使用 摄像头代码采集物体图像,在IDE右上角缓冲区点击“禁用”将要识别的物体确认下来:

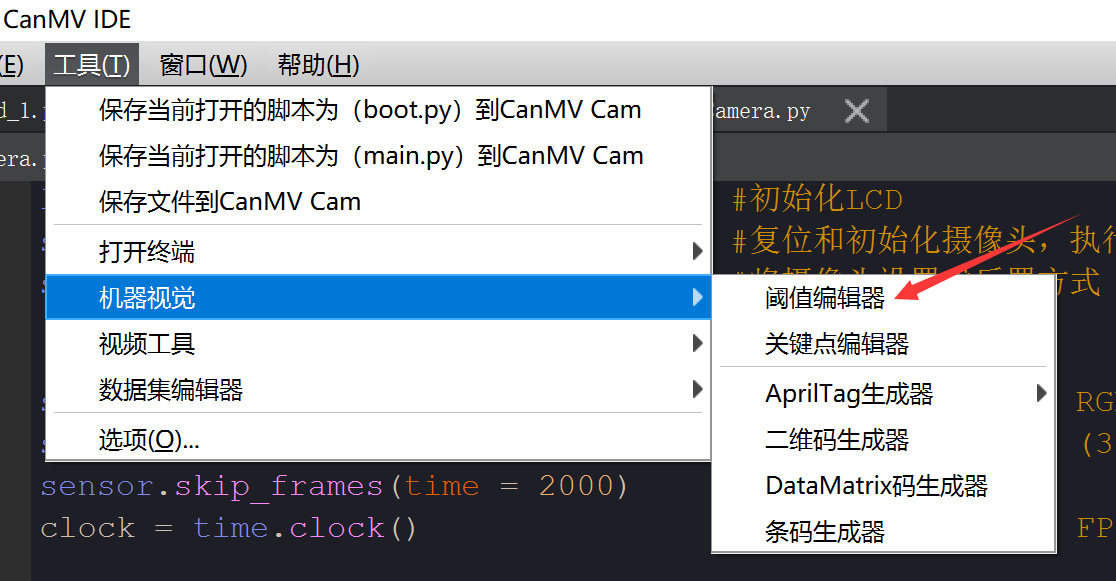
点击 工具—机器视觉—阈值编辑器 。
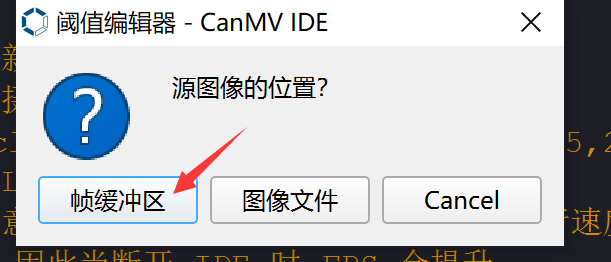
在弹出的对话框选择“帧缓冲区”。
通过调整下方6个LAB值,使得物体颜色在右边为白色,其余背景为黑色。(需要花费一点时间,找到临界值效果更佳。)
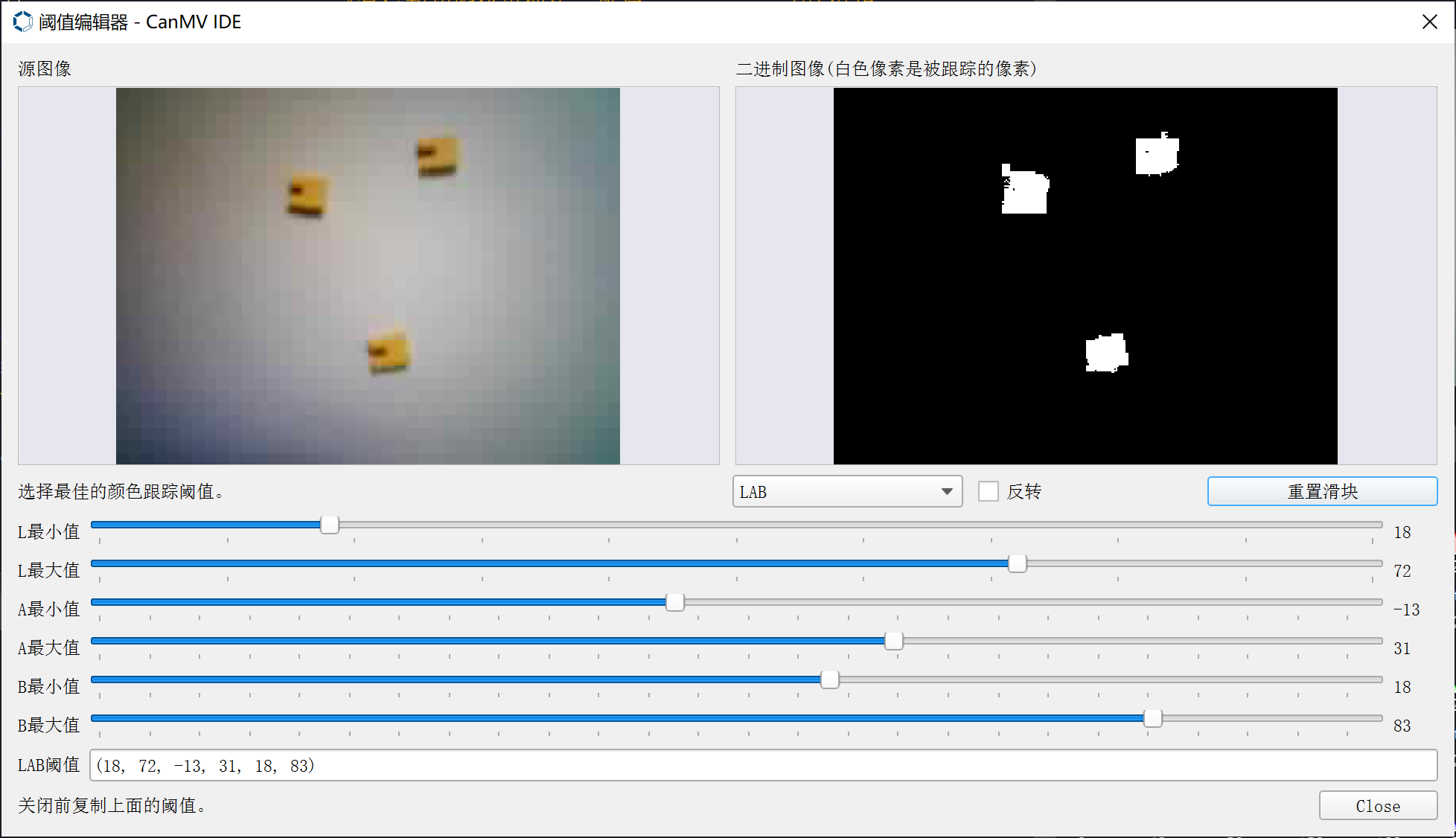
记录颜色的LAB值,在后面代码中使用。

学会了找色块函数和颜色阈值获取方法后,我们可以理清一下编程思路,代码编写流程如下:
参考代码
'''
实验名称:物体计数(相同颜色物体)
实验平台:01Studio CanMV K230
教程:wiki.01studio.cc
'''
import time, os, sys
from media.sensor import * #导入sensor模块,使用摄像头相关接口
from media.display import * #导入display模块,使用display相关接口
from media.media import * #导入media模块,使用meida相关接口
thresholds = [(18, 72, -13, 31, 18, 83)] #黄色跳线帽阈值
try:
sensor = Sensor() #构建摄像头对象
sensor.reset() #复位和初始化摄像头
sensor.set_framesize(width=800, height=480) #设置帧大小为LCD分辨率(800x480),默认通道0
sensor.set_pixformat(Sensor.RGB565) #设置输出图像格式,默认通道0
Display.init(Display.ST7701, to_ide=True) #同时使用3.5寸mipi屏和IDE缓冲区显示图像,800x480分辨率
#Display.init(Display.VIRT, sensor.width(), sensor.height()) #只使用IDE缓冲区显示图像
MediaManager.init() #初始化media资源管理器
sensor.run() #启动sensor
clock = time.clock()
while True:
os.exitpoint() #检测IDE中断
################
## 这里编写代码 ##
################
clock.tick()
img = sensor.snapshot()
blobs = img.find_blobs([thresholds[0]])
if blobs: #画框显示
for b in blobs:
tmp=img.draw_rectangle(b[0:4])
tmp=img.draw_cross(b[5], b[6])
#显示计算信息
img.draw_string_advanced(0, 0, 30, 'FPS: '+str("%.3f"%(clock.fps()))+' Num: '
+str(len(blobs)), color = (255, 255, 255))
Display.show_image(img)
print(clock.fps()) #打印FPS
###################
# IDE中断释放资源代码
###################
except KeyboardInterrupt as e:
print("user stop: ", e)
except BaseException as e:
print(f"Exception {e}")
finally:
# sensor stop run
if isinstance(sensor, Sensor):
sensor.stop()
# deinit display
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# release media buffer
MediaManager.deinit()
实验结果
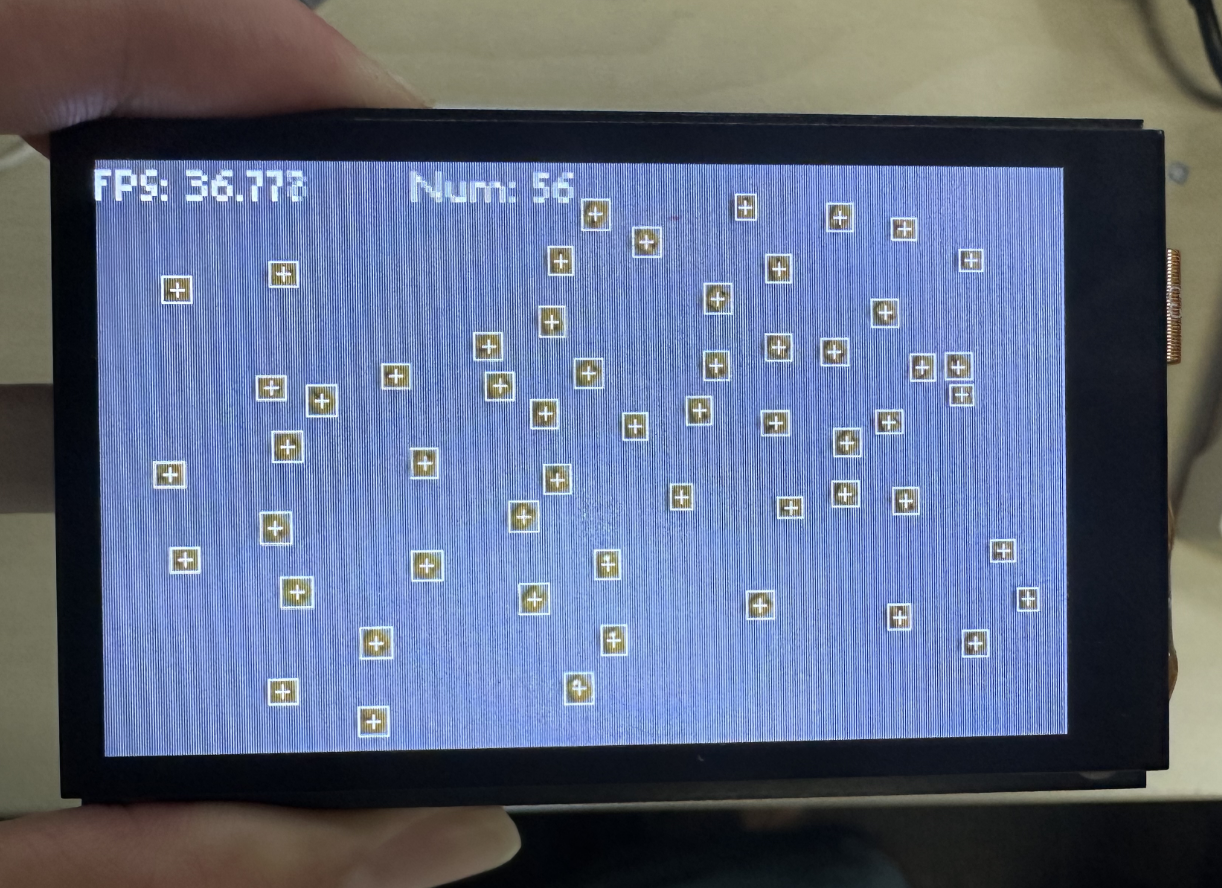
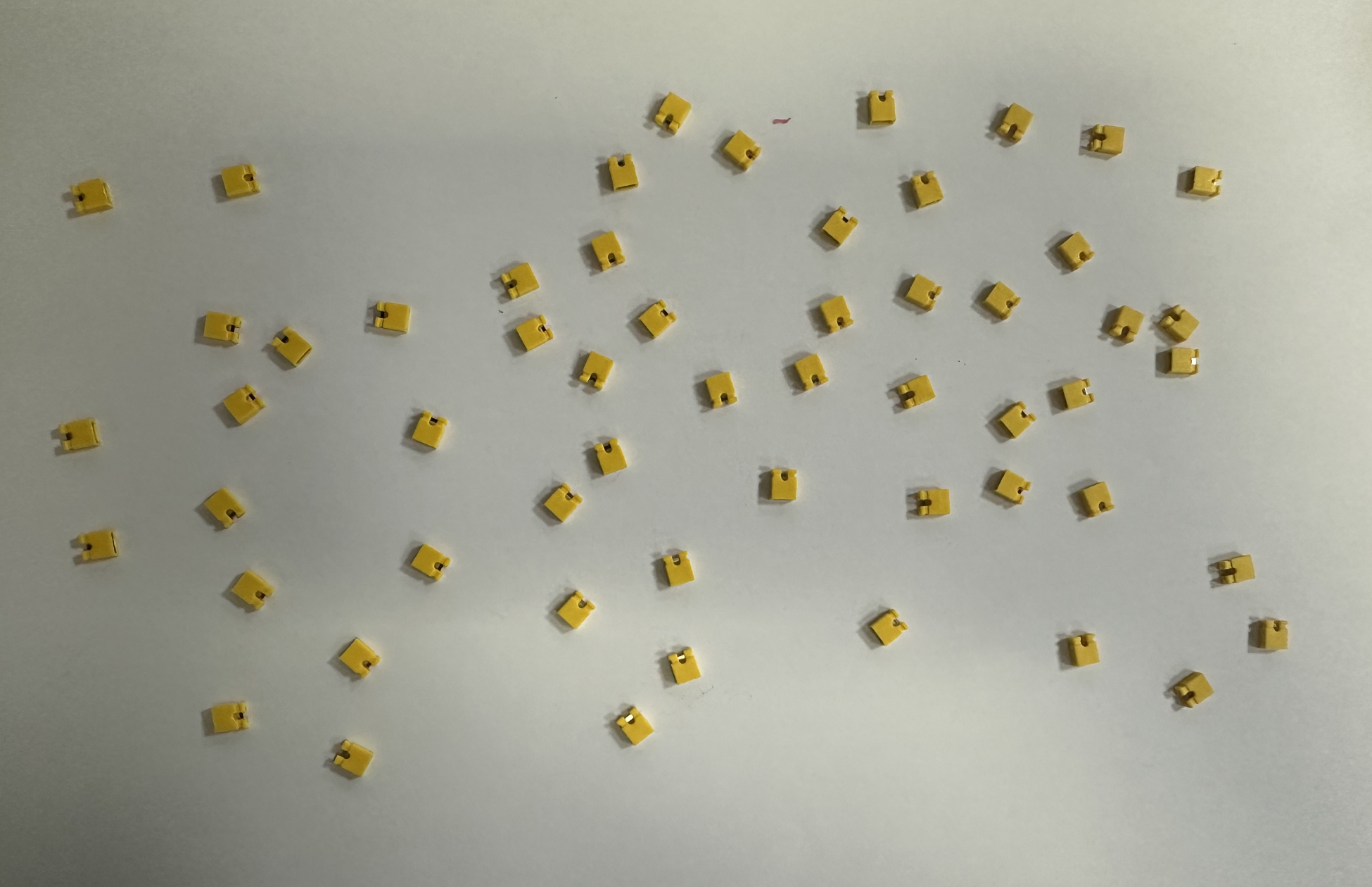
在IDE中运行代码,这里尝试识别多个跳线帽,可以看到准确度非常高:
待识别物体:
识别结果: