摄像头
前言
从前面的基础实验我们熟悉了K230基于MicroPython的编程方法,但那可以说是只发挥了K230冰山一角的性能应用,摄像头是整个机器视觉应用的基础。今天我们就通过示例代码来看看CanMV K230是如何使用摄像头的。
实验目的
学习K230摄像头使用。
实验讲解
在CanMV IDE中打开 零一科技(01Studio)CanMV K230开发套件配套资料\02-例程源码\2.机器视觉\1.摄像头应用 目录下的camera.py文件。

打开后发现编辑框出现了相关代码,我们可以先直接跑一下代码看看实验现象,连接CanMV K230,点击运行,可以发右图上方出现了摄像头实时采集的图像。

CanMV K230使用camera模块实现摄像头采集图像功能,K230硬件支持3路sensor输入(CSI接口),每个sensor设备均可独立完成图像数据采集捕获处理,并可以同时输出3路图像数据。如下图:

sensor 0,sensor 1,sensor 2表示三个图像传感器;Camera Device 0,Camera Device 1,Camera Device 2表示三个sensor设备;output channel 0,output channel 1,output channel 2表示sensor设备的三个输出通道。三个图像传感器可以通过软件配置映射到不同的sensor 设备。
Sensor对象
构造函数
from media.sensor import * #导入sensor模块,使用摄像头相关接口
sensor = Sensor(id,[width, height, fps])
构建摄像头对象。目前支持摄像头型号有:GC2093、OV5647
id: CSI输入号。0: CSI0;1: CSI1;2: CSI2;默认值,开发板上的摄像头。
width: 可选参数,sensor采集图像宽度。默认1920;height: 可选参数,sensor采集图像高度。默认1080;fps: 可选参数,sensor最大帧率。默认30;
使用方法
sensor.reset()
复位和初始化摄像头。
sensor.set_framesize(framesize = FRAME_SIZE_INVAILD, [width, height],chn = CAM_CHN_ID_0, alignment=0, **kwargs)
设置每个通道的图像输出尺寸。
framesize: 通道图像输出尺寸。下面列出一些常用尺寸。自定义尺寸可以通过[width, height]参数设置,如: width=800, height=480 。注意framesize和[width, height]只使用其中一种方式设置。sensor.QQVGA: 320x240sensor.QVGA: 320x240sensor.VGA: 640x480;Sensor.FHD: 1920x1080;Sensor.HD: 1280x720;
chn: 通道编号。每个摄像头设备有3个通道。CAM_CHN_ID_0: 通道0;CAM_CHN_ID_1: 通道1;CAM_CHN_ID_2: 通道2;
sensor.set_pixformat(pixformat, chn = CAM_CHN_ID_0)
设置图像像素格式。
pixformat: 格式。sensor.GRAYSCALE: 灰度图像,每像素8位(1字节),处理速度快。sensor.RGB565: 每像素为16位(2字节),5位用于红色,6位用于绿色,5位用于蓝色,处理速度比灰度图像要慢。sensor.RGB888sensor.RGBP888sensor.YUV420SP
chn: 通道编号。每个摄像头设备有3个通道。CAM_CHN_ID_0: 通道0;CAM_CHN_ID_1: 通道1;CAM_CHN_ID_2: 通道2;
sensor.set_hmirror(enable)
设置摄像头画面水平镜像。
enable: 格式。1: 开启水平镜像;0: 关闭水平镜像。
sensor.set_vflip(enable)
设置摄像头画面垂直翻转。
enable: 格式。1: 开启垂直翻转;0: 关闭垂直翻转。
提示:通过设置摄像头的水平镜像和垂直翻转组合可以实现任意画面变换。
sensor.run()
启动摄像头。
sensor.snapshot()
使用相机拍摄一张照片,并返回 image 对象。
更多用法请阅读: CanMV K230官方文档
clock对象
我们再来看看本例程用于计算FPS(每秒帧数)的clock模块。
构造函数
clock=time.clock()
构建一个时钟对象。
使用方法
clock.tick()
开始追踪运行时间。
clock.fps()
停止追踪运行时间,并返回当前FPS(每秒帧数)。在调用该函数前始终首先调用 clock.tick() 。
本节还有缓冲区图像显示代码,会在下一节会详细讲解,本节主要讲述摄像头使用。我们来看看代码的编写流程图:
参考代码
'''
实验名称:摄像头使用
实验平台:01Studio CanMV K230
说明:实现摄像头图像采集显示
'''
import time, os, sys
from media.sensor import * #导入sensor模块,使用摄像头相关接口
from media.display import * #导入display模块,使用display相关接口
from media.media import * #导入media模块,使用meida相关接口
sensor = Sensor() #构建摄像头对象
sensor.reset() #复位和初始化摄像头
sensor.set_framesize(Sensor.FHD) #设置帧大小FHD(1920x1080),默认通道0
sensor.set_pixformat(Sensor.RGB565) #设置输出图像格式,默认通道0
#使用IDE缓冲区输出图像,显示尺寸和sensor配置一致。
Display.init(Display.VIRT, sensor.width(), sensor.height(), to_ide=True)
MediaManager.init() #初始化media资源管理器
sensor.run() #启动sensor
clock = time.clock()
while True:
################
## 这里编写代码 ##
################
clock.tick()
img = sensor.snapshot() #拍摄一张图
Display.show_image(img) #显示图片
print(clock.fps()) #打印FPS
实验结果
CanMV K230 和 CanMV K230 mini板载摄像头默认接在CSI2接口(上面代码默认接口)。如果使用CM-K230核心板套件,请将也摄像头接在CSI2接口。
点击运行代码,可以看到在右边显示摄像头实时拍摄情况,下方则显示RGB颜色直方图。
点击左下角串口终端,可以看到实时显示当前的FPS(每秒帧数)值约为30帧。

通过本实验,我们了解了摄像头sensor模块以及时间time模块的原理和应用,可以看到CanMV将摄像头功能封装成sensor模块,用户不必关注底层代码编可以轻松使用。
多路摄像头接口使用
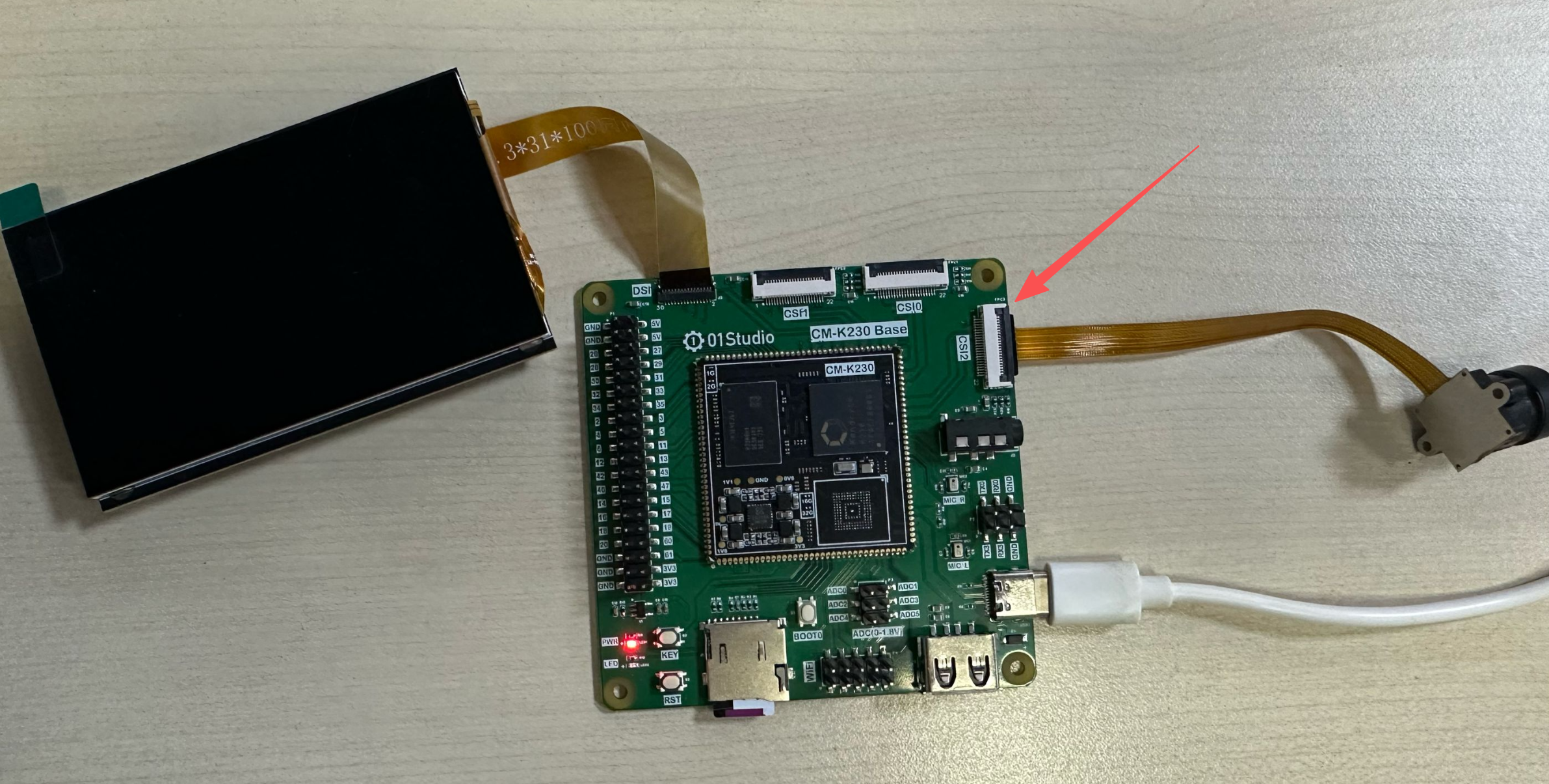
01科技 CanMV K230除了CSI2接口标配的GC2093(60FPS)摄像头外,还可以通过CSI0、CSI1接口外接摄像头。外接摄像头目前支持型号:
CanMV K230 支持CSI0(2lane)和CSI1(2lane)两路扩展。

CanMV K230 mini 支持CSI0(4lane,兼容2lane)1路扩展。
CM-K230核心板套件 CSI0(2lane)和CSI1(2lane)两路扩展。

使用方法很简单,只需要在上面示例代码基础上在初始化时候配置id参数即可,id默认值为2。
CSI0接口
...
sensor = Sensor(id=0) #id=0表示使用CSI0接口上的摄像头
...
CSI1接口
...
sensor = Sensor(id=1) #id=1表示使用CSI1接口上的摄像头
...
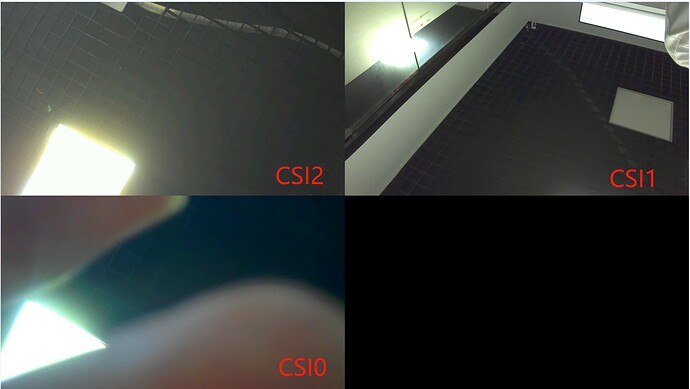
3路摄像头同时显示图像代码
当前支持3路摄像头同时显示图像,但不支持同时使用AI视觉。
CanMV K230 层概念>>
'''
# Copyright (c) [2025] [01Studio]. Licensed under the MIT License.
实验名称:3路摄像头同时采集图像
实验平台:01Studio CanMV K230
说明:实现摄像头图像采集显示
'''
import time, os, sys
from media.sensor import * #导入sensor模块,使用摄像头相关接口
from media.display import * #导入display模块,使用display相关接口
from media.media import * #导入media模块,使用meida相关接口
#默认摄像头GC2093
sensor2 = Sensor(id=2) #构建摄像头对象
sensor2.reset() #复位和初始化摄像头
sensor2.set_framesize(width = 960, height = 540) #设置帧大小
sensor2.set_pixformat(Sensor.RGB565) #设置输出图像格式,默认通道0
#CSI1接口
sensor1 = Sensor(id=1) #构建摄像头对象
sensor1.reset() #复位和初始化摄像头
sensor1.set_framesize(width = 960, height = 540) #设置帧大小
sensor1.set_pixformat(Sensor.YUV420SP) #设置输出图像格式
bind_info = sensor1.bind_info(x = 960, y = 0)
Display.bind_layer(**bind_info, layer = Display.LAYER_VIDEO1) #输出通道1
#CSI0接口
sensor0 = Sensor(id=0) #构建摄像头对象
sensor0.reset() #复位和初始化摄像头
sensor0.set_framesize(width = 960, height = 540) #设置帧大小FHD(1920x1080),默认通道0
sensor0.set_pixformat(Sensor.YUV420SP) #设置输出图像格式
bind_info = sensor0.bind_info(x = 0, y = 540)
Display.bind_layer(**bind_info, layer = Display.LAYER_VIDEO2) #输出通道2
#使用IDE缓冲区输出图像,显示尺寸和sensor配置一致。
Display.init(Display.LT9611, to_ide = True)
MediaManager.init() #初始化media资源管理器
sensor2.run() #启动sensor
sensor1.run() #启动sensor
sensor0.run() #启动sensor
clock = time.clock()
while True:
################
## 这里编写代码 ##
################
clock.tick()
img = sensor2.snapshot() #拍摄一张图
Display.show_image(img) #显示图片
print(clock.fps()) #打印FPS
实验结果
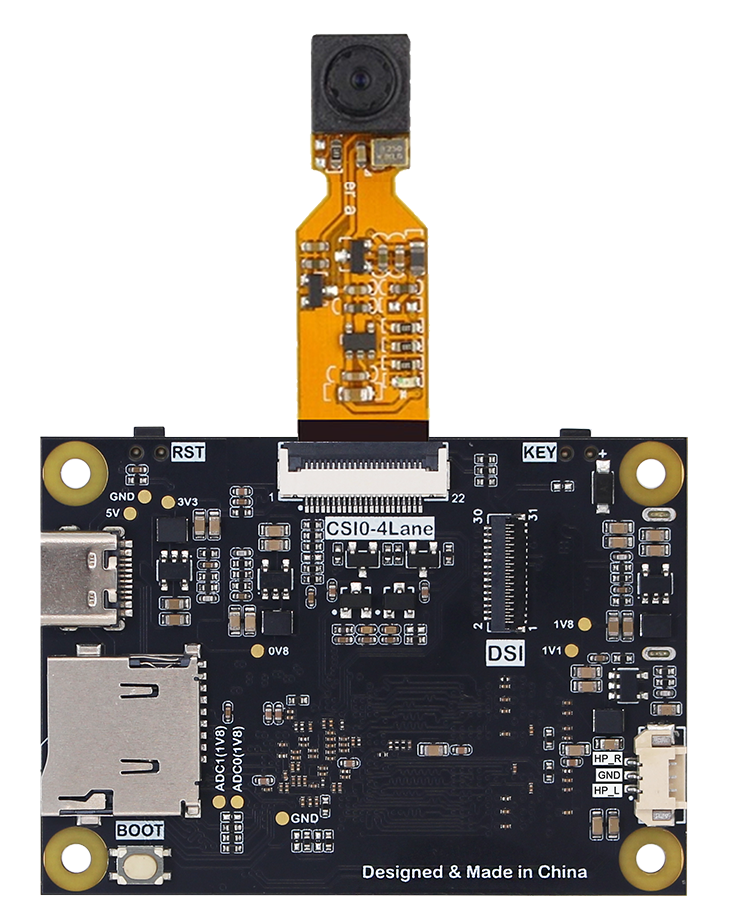
AF(自动对焦)摄像头
下面AF摄像头代码需要使用 2026-1-20(v1.4-41以上版本)镜像。
自动对焦模式
自动调焦摄像头可以通过下面代码来实现总调焦
'''
实验名称:AF(自动对焦)摄像头使用
实验平台:01Studio CanMV K230 / CanMV K230 mini
说明:实现自动对焦摄像头图像采集显示
'''
import time, os, sys
from media.sensor import * #导入sensor模块,使用摄像头相关接口
from media.display import * #导入display模块,使用display相关接口
from media.media import * #导入media模块,使用meida相关接口
sensor = Sensor(id=0) #构建摄像头对象,将AF摄像头接到CSI0接口
sensor.reset() #复位和初始化摄像头
sensor.set_framesize(Sensor.FHD) #设置帧大小FHD(1920x1080),默认通道0
sensor.set_pixformat(Sensor.RGB565) #设置输出图像格式,默认通道0
sensor.auto_focus(True) # 开启自动对焦
#使用IDE缓冲区输出图像,显示尺寸和sensor配置一致。
Display.init(Display.VIRT, sensor.width(), sensor.height(), to_ide=True)
MediaManager.init() #初始化media资源管理器
sensor.run() #启动sensor
clock = time.clock()
while True:
################
## 这里编写代码 ##
################
clock.tick()
img = sensor.snapshot() #拍摄一张图
Display.show_image(img) #显示图片
print("当前对焦位置:", sensor.focus_pos()) # 获取当前对焦位置
print(clock.fps()) #打印FPS
相对于普通摄像头,主要增加了下面代码:
...
sensor.auto_focus(True) # 开启自动对焦
...
print("当前对焦位置:", sensor.focus_pos()) # 获取当前对焦位置
...
设置固定对焦位置模式
除了上面的自动对焦模式,你也可以通过代码指定对焦位置。
注意需要注释掉自动对焦那行代码#sensor.auto_focus(True),参考代码如下
'''
实验名称:AF(自动对焦)摄像头使用--固定对焦位置
实验平台:01Studio CanMV K230 / CanMV K230 mini
说明:实现自动对焦摄像头图像采集显示
'''
import time, os, sys
from media.sensor import * #导入sensor模块,使用摄像头相关接口
from media.display import * #导入display模块,使用display相关接口
from media.media import * #导入media模块,使用meida相关接口
sensor = Sensor(id=0) #构建摄像头对象,将AF摄像头接到CSI0接口
sensor.reset() #复位和初始化摄像头
sensor.set_framesize(Sensor.FHD) #设置帧大小FHD(1920x1080),默认通道0
sensor.set_pixformat(Sensor.RGB565) #设置输出图像格式,默认通道0
#sensor.auto_focus(True) # 开启自动对焦
#使用IDE缓冲区输出图像,显示尺寸和sensor配置一致。
Display.init(Display.VIRT, sensor.width(), sensor.height(), to_ide=True)
MediaManager.init() #初始化media资源管理器
sensor.run() #启动sensor
clock = time.clock()
sensor.focus_pos(300) #设置对焦位置,取值范围0-1023
while True:
################
## 这里编写代码 ##
################
clock.tick()
img = sensor.snapshot() #拍摄一张图
Display.show_image(img) #显示图片
print("当前对焦位置:", sensor.focus_pos()) # 获取当前对焦位置
print(clock.fps()) #打印FPS
相对于普通摄像头,主要增加了下面代码:
...
sensor.focus_pos(300) #设置对焦位置,取值范围0-1023
...
print("当前对焦位置:", sensor.focus_pos()) # 获取当前对焦位置
...