多路舵机/电机模块
前言
前面我们学习了单一舵机控制,但在一些需要多舵机/电机的场合,如机器人或小车等就需要同时控制多路舵机。那么这节我们来学习一下如何使用CanMV K230开发板控制多路舵机、电机和步进电机。
实验平台
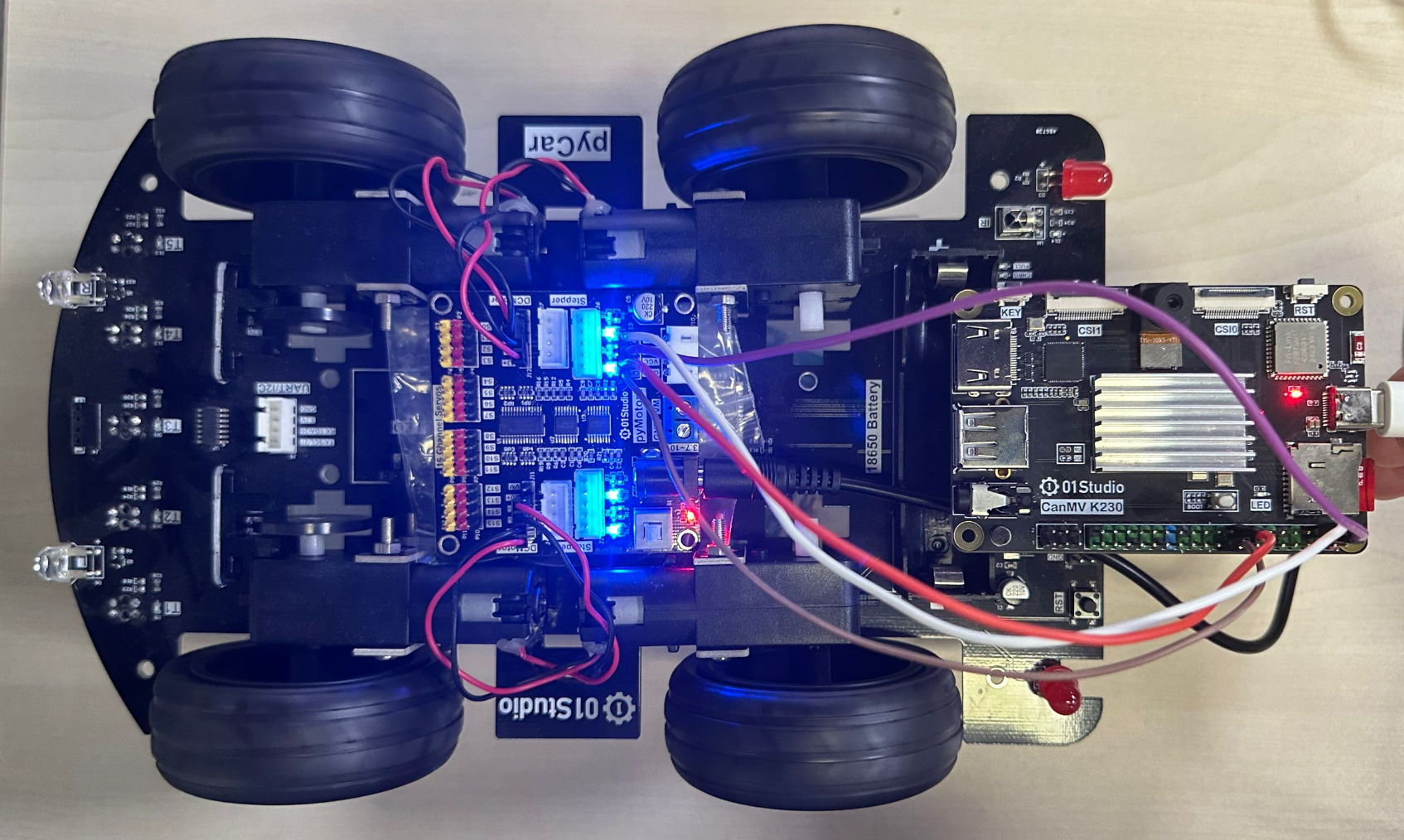
01Studio CanMV K230开发套件和pyMotors多功能电机模块。 点击购买>>
实验目的
通过编程实现对多路舵机、电机和步进电机的控制。
实验讲解
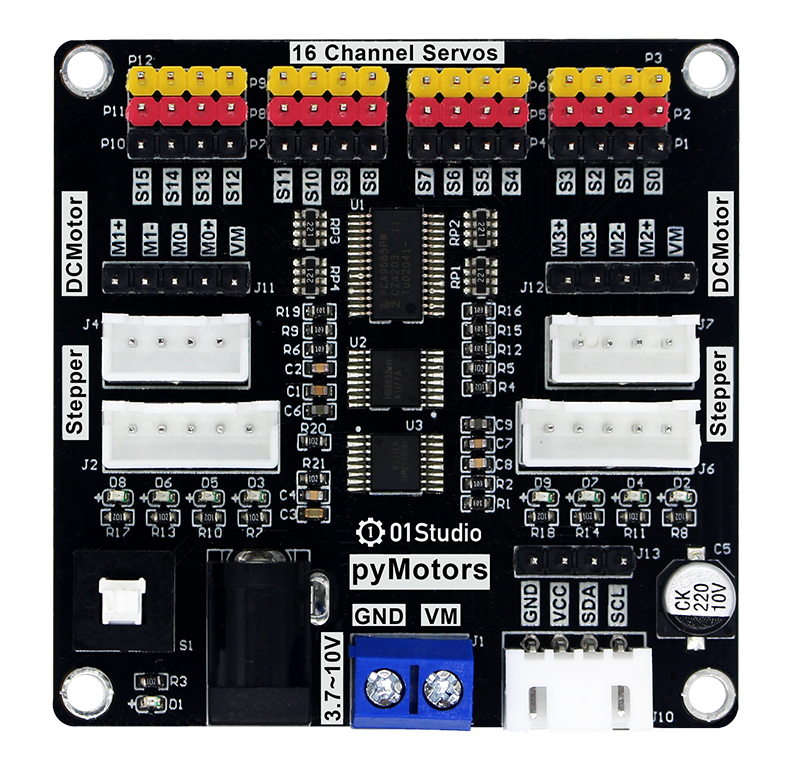
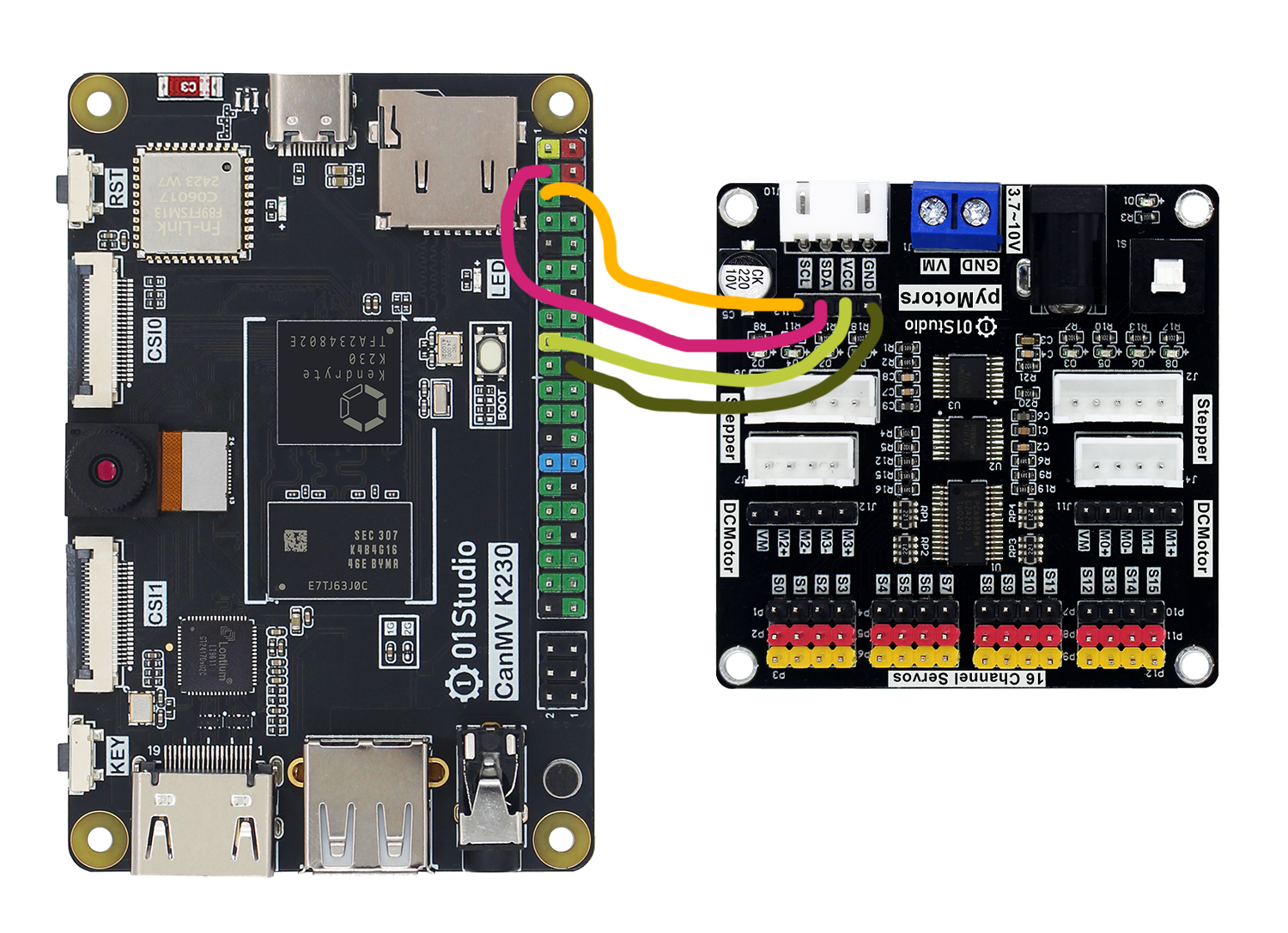
pyMotors多功能电机模块基于PCA9685,这是一款I2C转16路PWM芯片,只需要通过K230的I2C接口即可控制最大16路PWM舵机、4路直流电机、2路42步进电机或4相5线步进电机。电机供电支持3.7V-10V输入。
pyMotors模块资料包:点击下载>>
本教程使用I2C2跟pyMotors模块连接。模块使用5V供电。
- CanMV K230
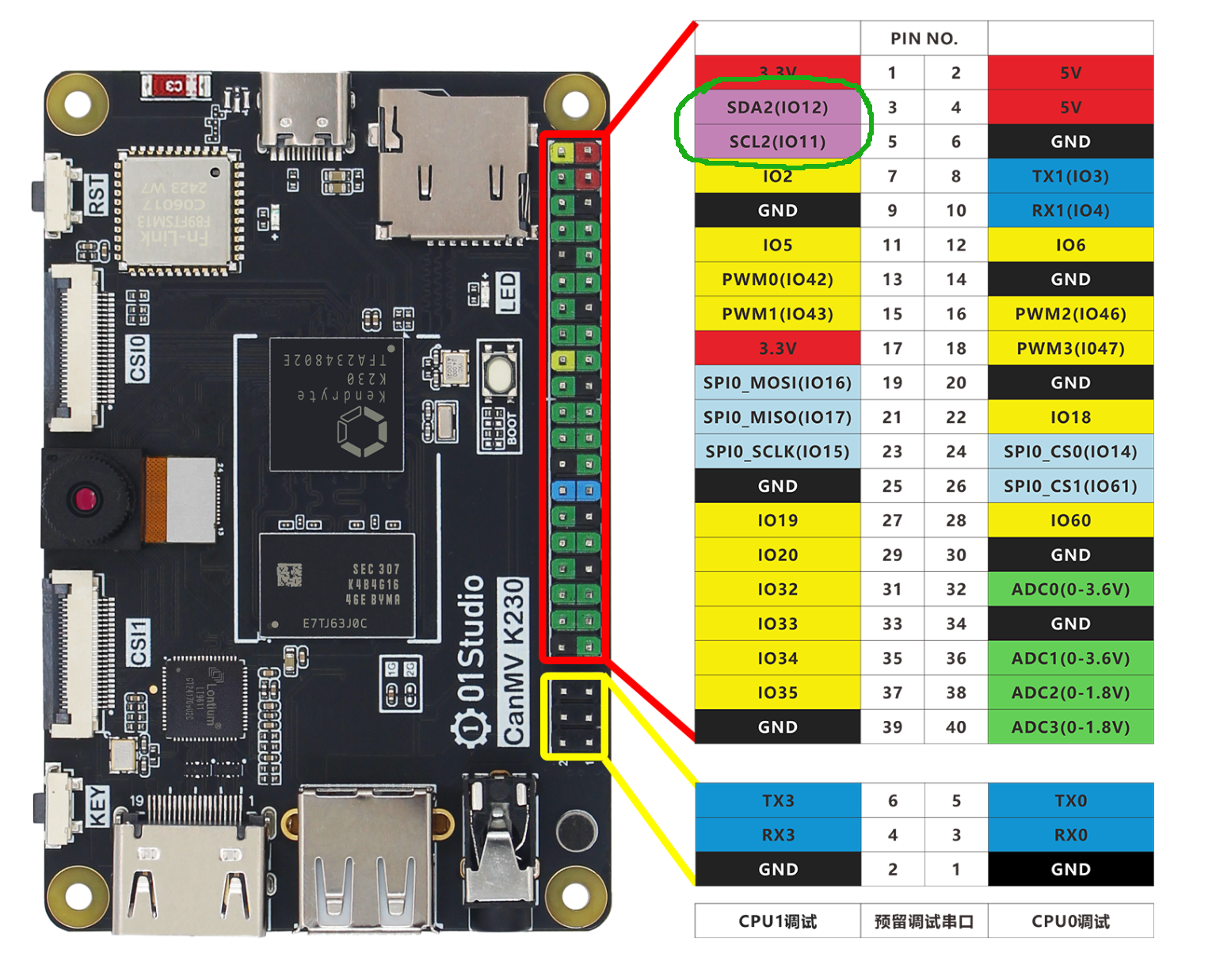
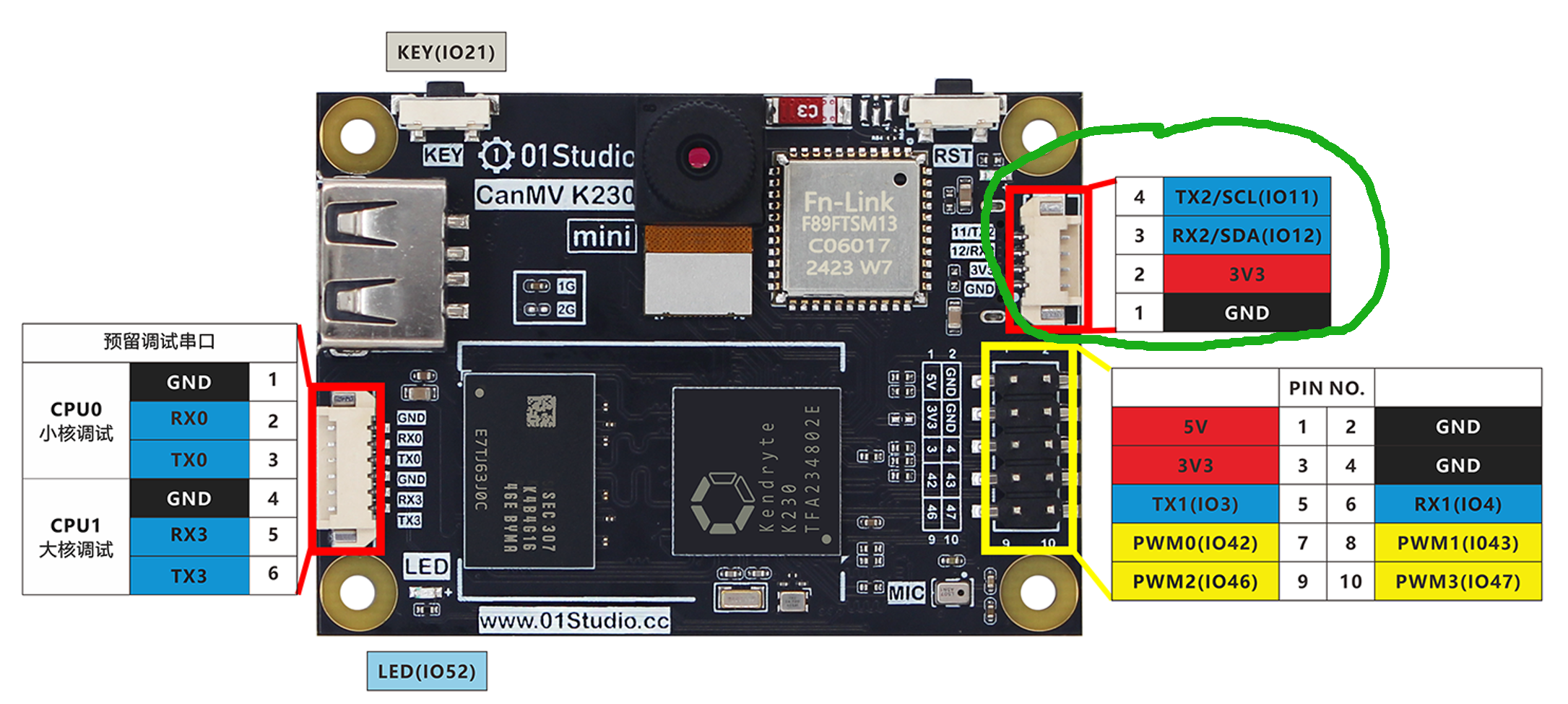
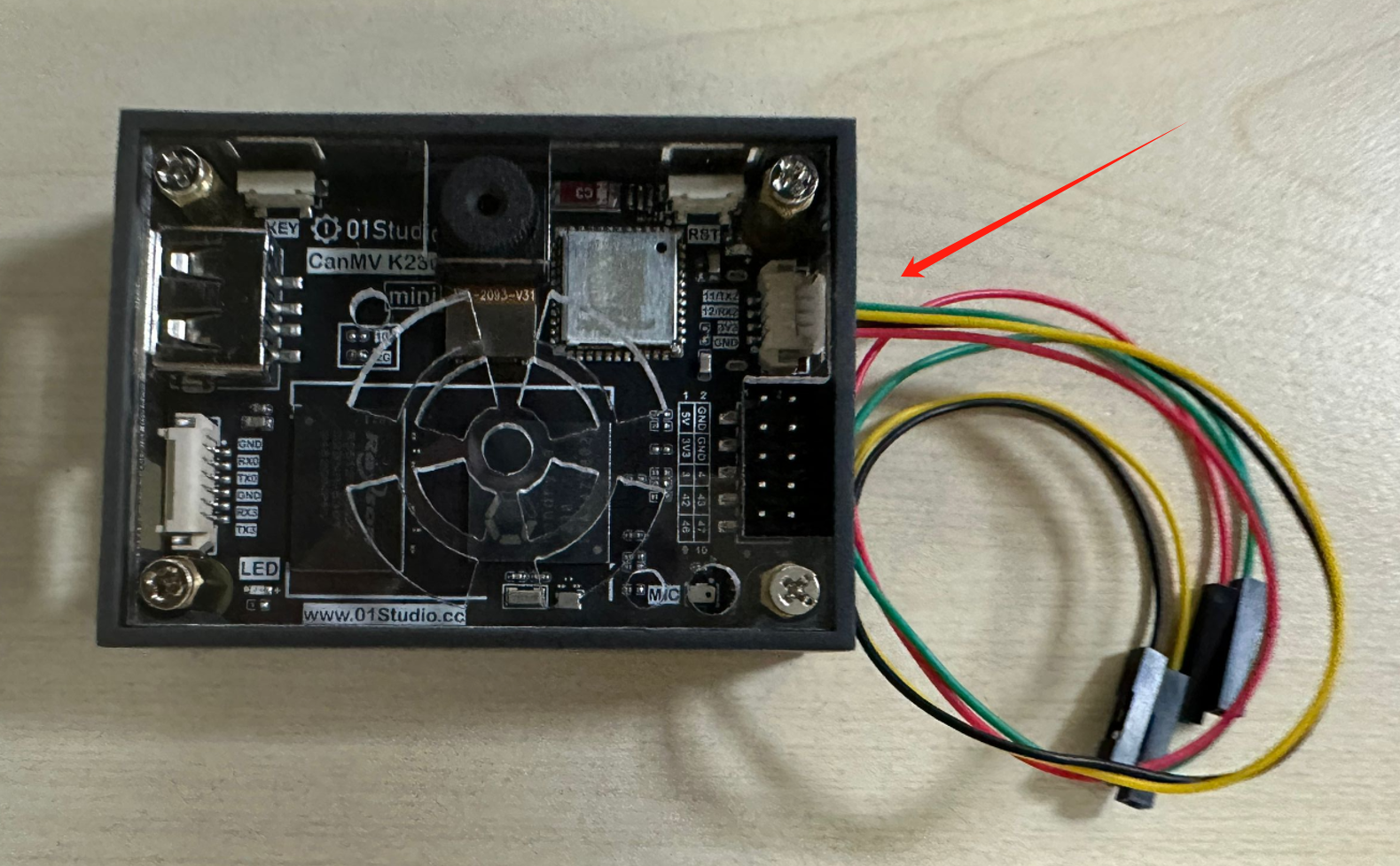
- CanMV K230 mini
CanMV K230 mini使用配套的转接杜邦线进行连接。
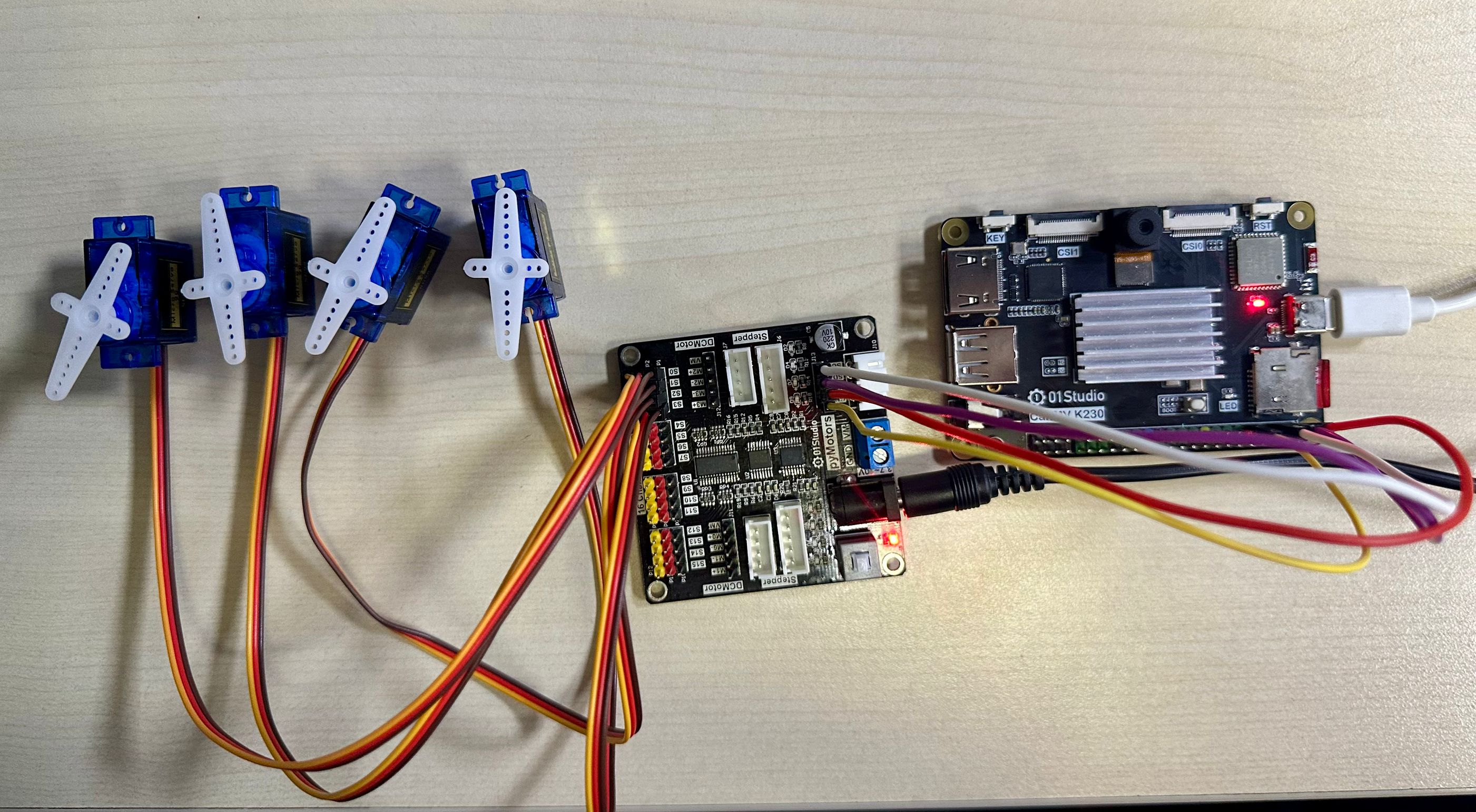
舵机
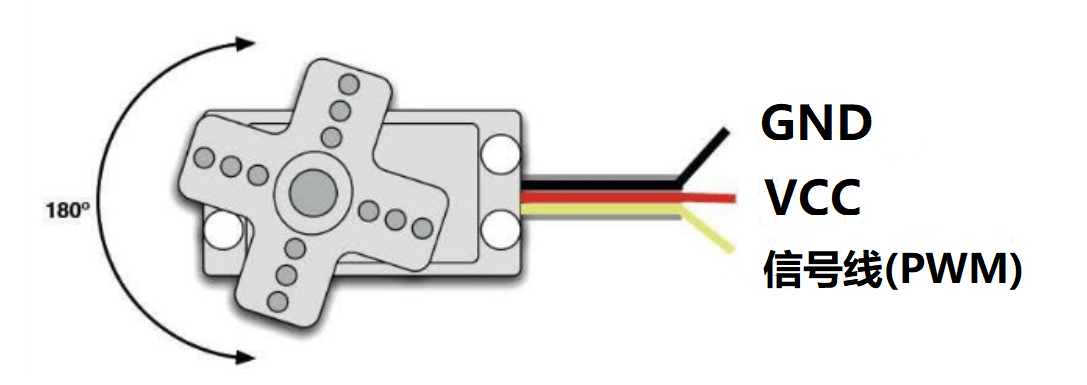
舵机通过3线(一般舵机的线序为信号,电源,地)控制,本节实验用到的是性价比较高的SG90舵机。通常情况下:黑色表示GND,红色表示VCC,橙色表示信号线。
舵机的详细控制原理可以参考 舵机 章节教程,这里不再重复。
Servos对象
舵机的microppython驱动库已经封装好,位于servo.py和pca9685.py ,只需要在主函数初始化I2C2和调用即可。
构造函数
from servo import Servos
...
s=Servos(i2c)
构建16路舵机对象。
使用方法
s.position(index, degrees=None)
设置某个舵机的位置。
index: 值为 0~15 ,表示16个舵机的编号;degrees: 值为 0~180 ,表示舵机的角度;
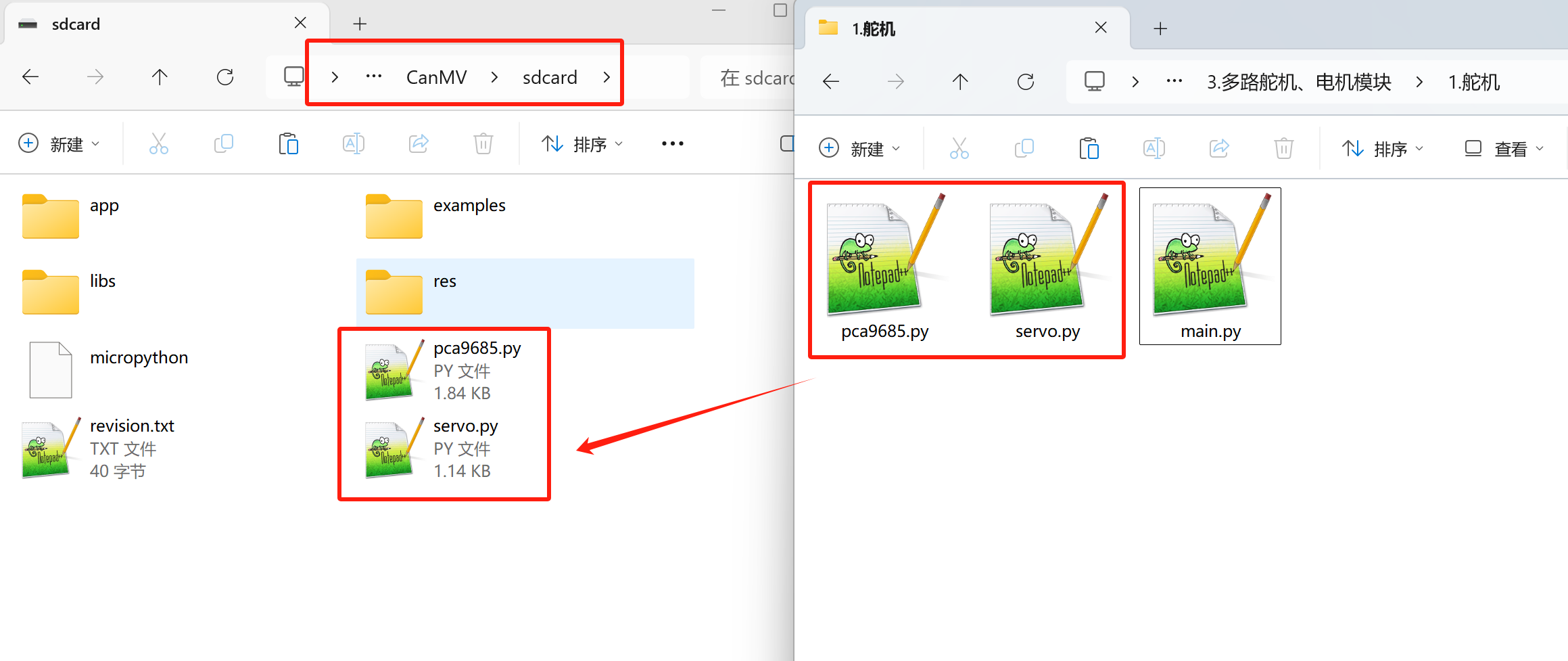
运行前需要将 servo.py和pca9685.py 文件发送到CanMV U盘 sdcard根目录。主函数代码如下:
参考代码
'''
# Copyright (c) [2025] [01Studio]. Licensed under the MIT License.
实验名称:pyMotors多功能电机模块
实验平台:01Studio CanMV K230
说明:同时控制16路舵机旋转
'''
from machine import I2C,FPIOA
from servo import Servos
import time
#将GPIO11,12配置为I2C2功能
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.IIC2_SCL)
fpioa.set_function(12, FPIOA.IIC2_SDA)
i2c = I2C(2) #构建I2C对象
#print(i2c.scan())
#构建16路舵机对象
s=Servos(i2c)
#舵机对象使用用法, 详情参看servo.py文件
#
#s.position(index, degrees=None)
#index: 0~15表示16路舵机;
#degrees: 角度,0~180。
while True:
for i in range(16):
s.position(i,0) #i为0~15的16路输出,0表示角度0度。
time.sleep(1)
for i in range(16):
s.position(i,180) #i为0~15的16路输出,180表示角度180度。
time.sleep(1)
实验结果
将资料包示例程序的库文件全部拷贝到CanMV U盘 sdcard根目录:
将180°舵机插到下图排针接口。运行上面主函数程序。可以看到全部舵机依次旋转至不同角度。最大支持16路,保证电源供电电流足够即可。
直流电机
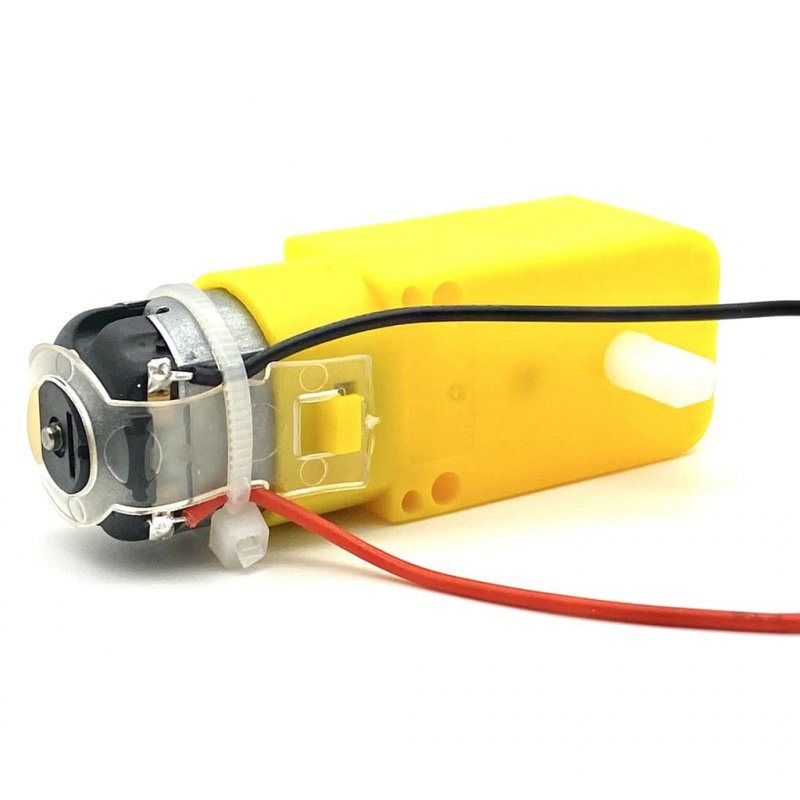
本机教程使用的直流电机为常用的TT马达,2个引脚,支持正转和反转,常用于智能小车等场景。
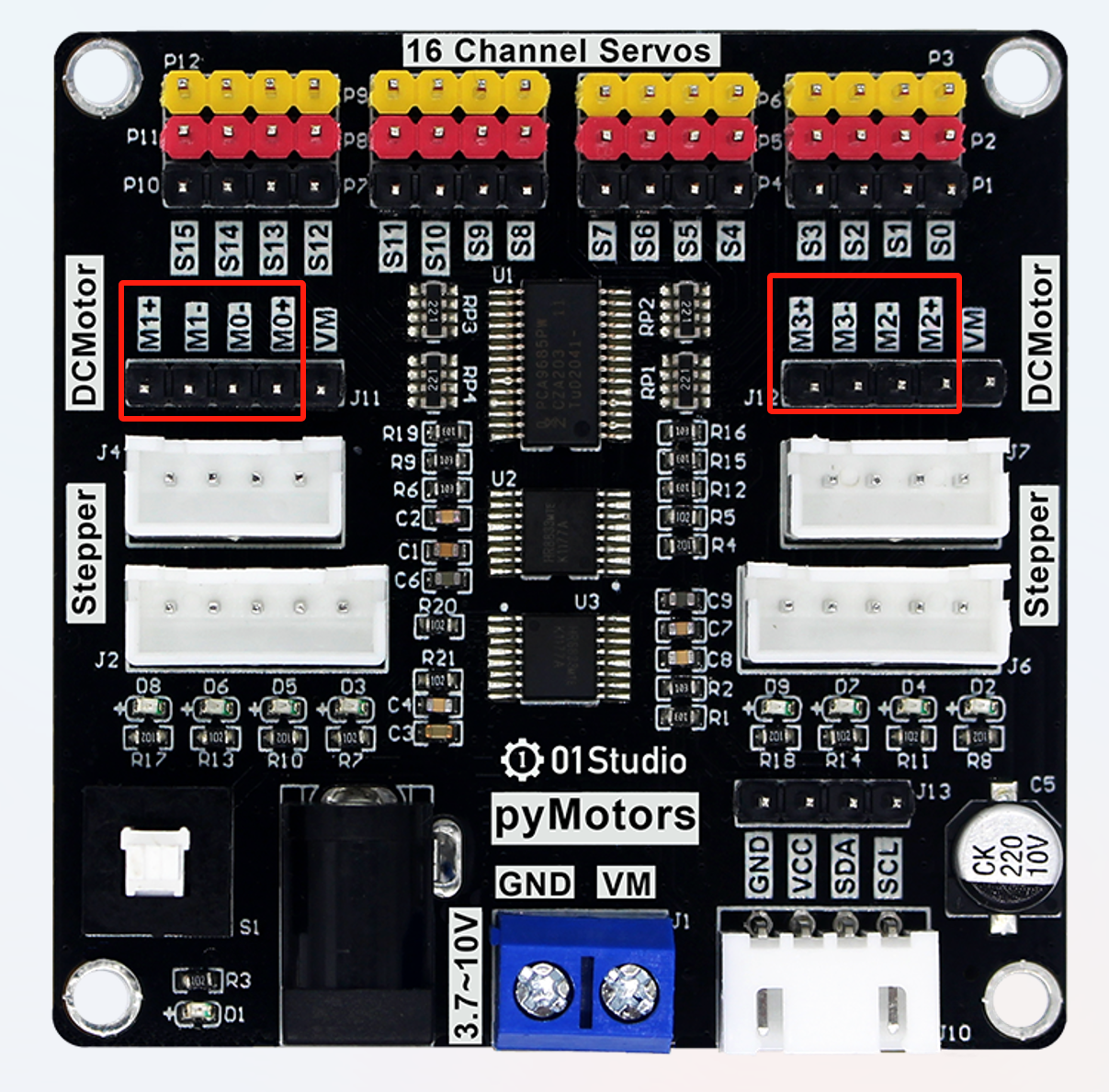
直流电机本质通过2个引脚施加电压控制正反转,通过PWM调速。pyMotors模块最大支持4路直流减速电机。M0到M3接口,+表示正,-表示负。
Motors对象
直流电机的microppython驱动库已经封装好,位于motor.py和pca9685.py ,只需要在主函数初始化I2C2和调用即可。
构造函数
from motor import Motors
...
m=Motors(i2c)
构建4路直流电机对象。
使用方法
m.speed(index, value=0)
电机控制函数。
index: 值为 0~3 ,表示4个直流电机的编号;value: 速度值。范围:-4095~4095,正负表示转向,绝对值越大速度越快;
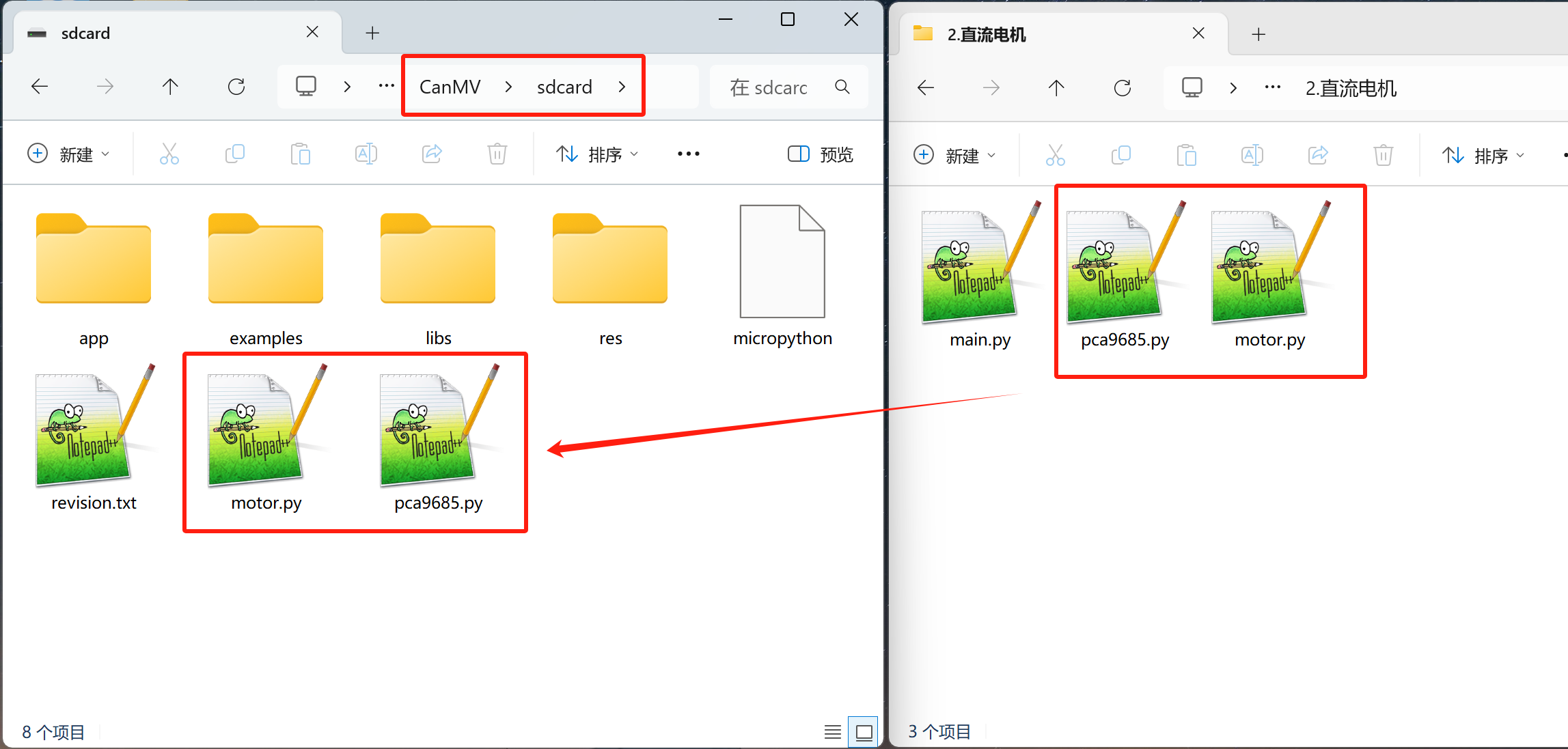
运行前需要将 motor.py和pca9685.py 文件发送到CanMV U盘 sdcard根目录。主函数代码如下:
参考代码
'''
# Copyright (c) [2025] [01Studio]. Licensed under the MIT License.
实验名称:pyMotors多功能电机模块
实验平台:01Studio CanMV K230
说明:同时控制4路直流减速电机
'''
from machine import I2C,FPIOA
from motor import Motors
import time
#将GPIO11,12配置为I2C2功能
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.IIC2_SCL)
fpioa.set_function(12, FPIOA.IIC2_SDA)
i2c = I2C(2) #构建I2C对象
#print(i2c.scan())
#构建4路直流电机对象
m=Motors(i2c)
#直流电机对象使用用法,详情参看motor.py文件
#
#m.speed(index, value=0)
#index: 0~3表示4路直流电机
#value: 速度。-4095~4095,正负表示转向,绝对值越大速度越大
#前进
m.speed(0,4095) #直流电机0正转,速度0~4095,4095表示最快速度
m.speed(1,4095)
m.speed(2,4095)
m.speed(3,4095)
time.sleep(3)
#后退
m.speed(0,-4095) #直流电机0反转,速度0~-4095,-4095表示反转最快速度
m.speed(1,-4095)
m.speed(2,-4095)
m.speed(3,-4095)
time.sleep(3)
#制动停止
for i in range(4):
m.brake(i)
实验结果
将资料包示例程序的库文件全部拷贝到CanMV U盘 sdcard根目录:
将电机插到下图排针接口。

运行上面主函数程序。可以看到直流电机旋转。最大支持4路,保证电源供电电流足够即可。
42步进电机
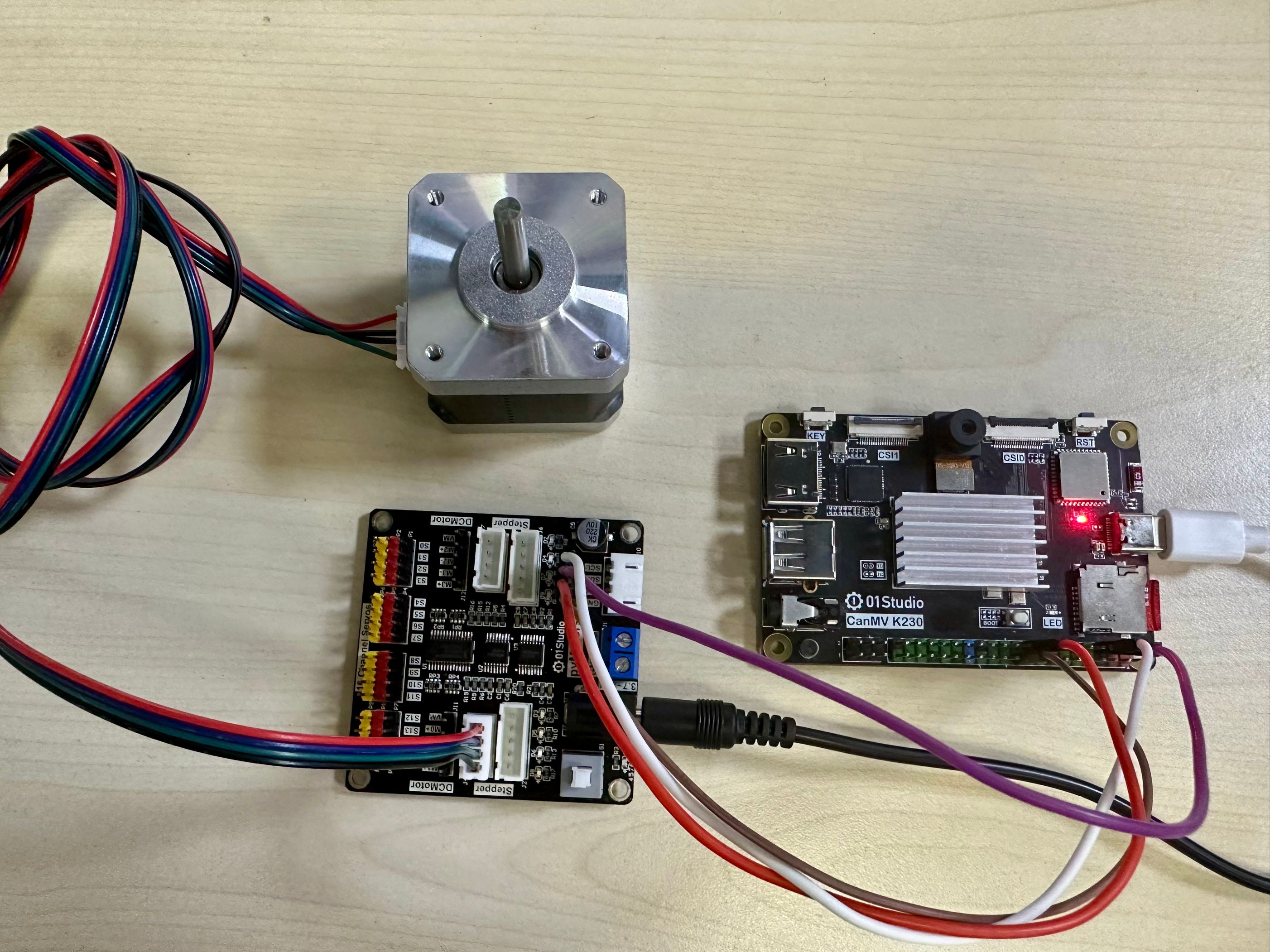
42步进电机是常用的步进电机,是指电机直径为42mm。点击购买>>,可以精准控制旋转步数。常用于3D打印机或一些机械设备精确控制场合。

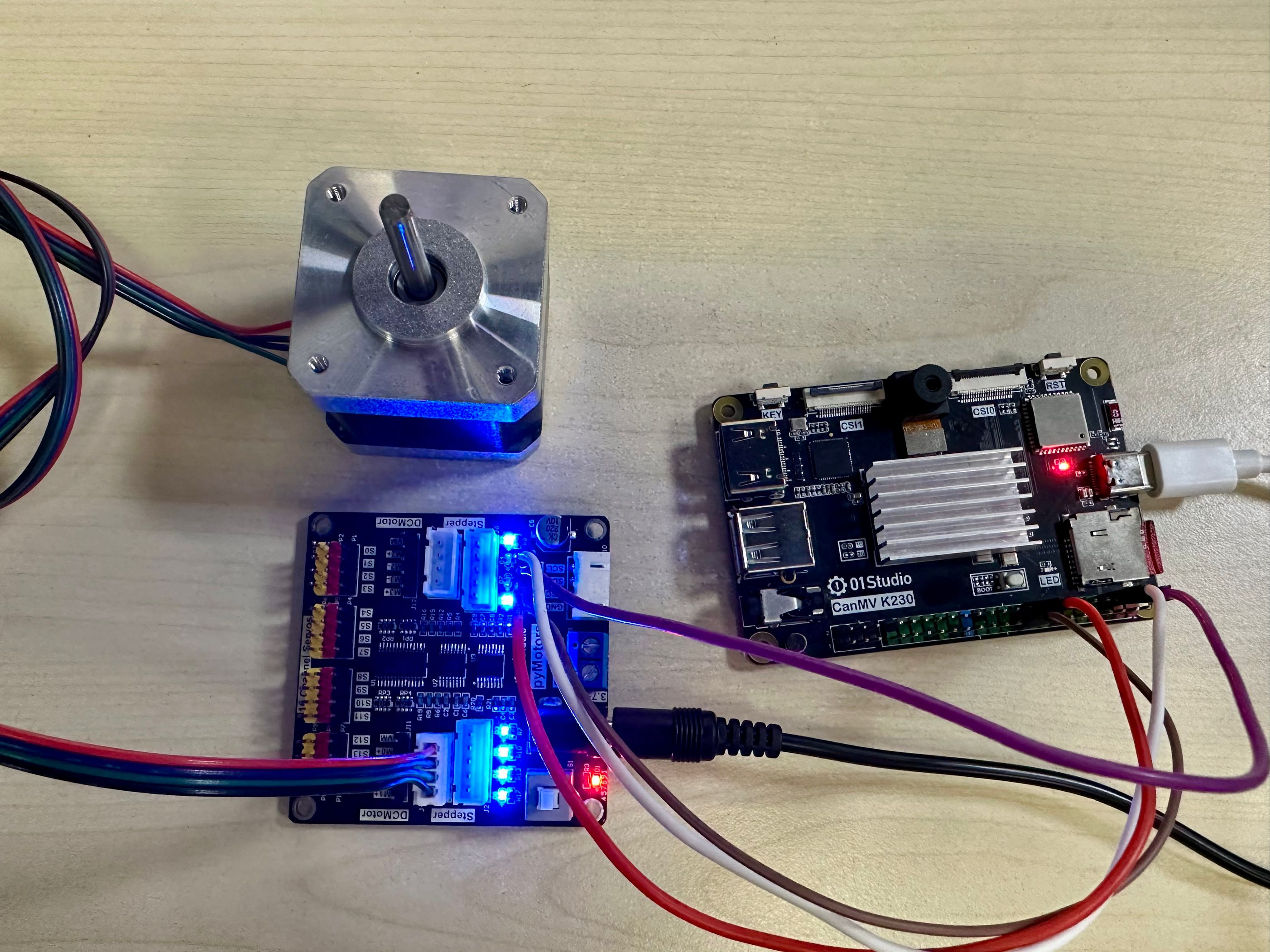
pyMotors模块支持2路42步进电机控制,接线如下:
Steppers对象
42步进电机的microppython驱动库已经封装好,位于stepper.py和pca9685.py ,只需要在主函数初始化I2C2和调用即可。
构造函数
from stepper import Steppers
...
s=Steppers(i2c)
构建2路42步进电机对象。
使用方法
s.Step(index, steps=0, direction=1,mode=4, interval=2)
42步进电机控制函数。
index: 值为 0~1 ,表示2个42步进电机的编号;steps: 转动步数;direction: 转动方向,1为正转,0为反转;mode: 转动模式,4表示4拍,8表示八拍;interval: 每拍间隔时间,单位为ms;
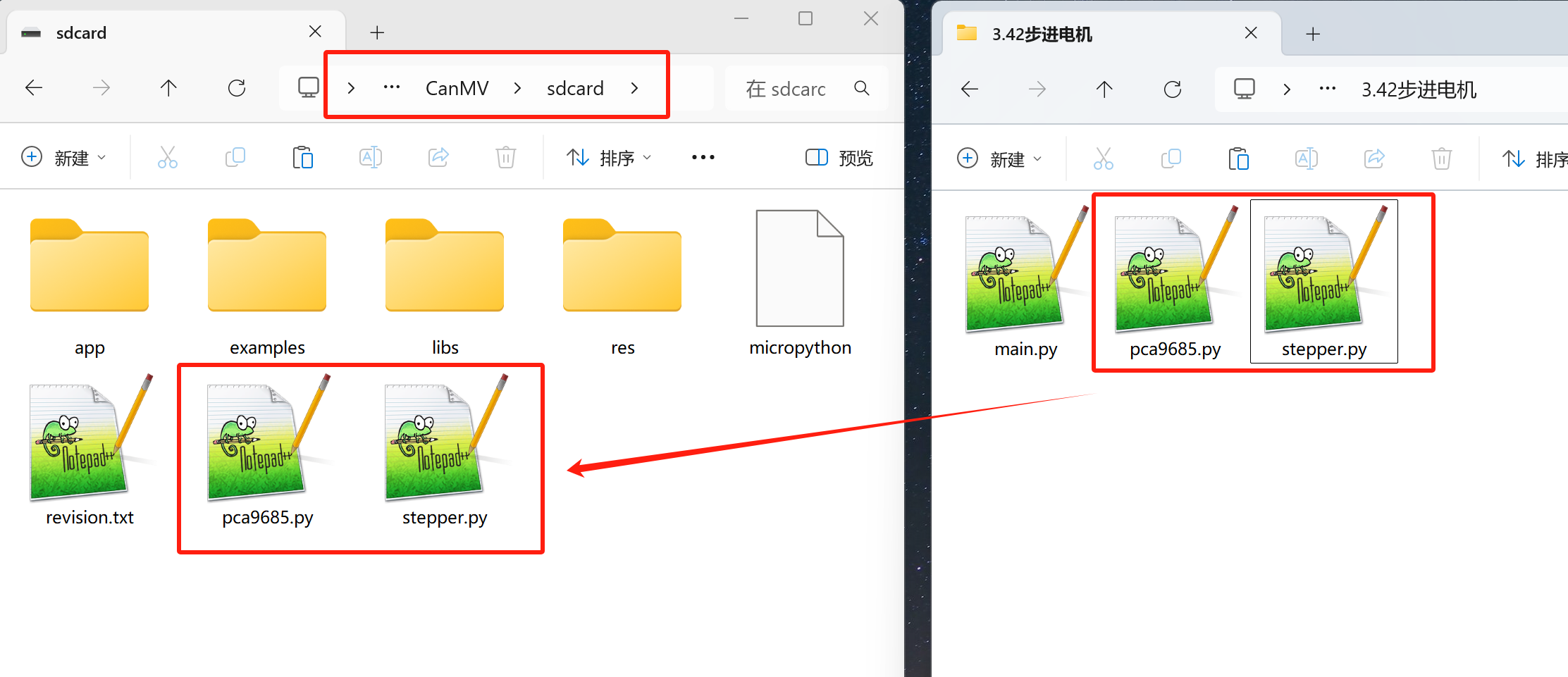
运行前需要将 stepper.py和pca9685.py 文件发送到CanMV U盘 sdcard根目录。主函数代码如下:
参考代码
'''
# Copyright (c) [2025] [01Studio]. Licensed under the MIT License.
实验名称:pyMotors多功能电机模块
实验平台:01Studio CanMV K230
说明:同时控制2路42步进电机
'''
from machine import I2C,FPIOA
from stepper import Steppers
import time
#将GPIO11,12配置为I2C2功能
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.IIC2_SCL)
fpioa.set_function(12, FPIOA.IIC2_SDA)
i2c = I2C(2) #构建I2C对象
#print(i2c.scan())
#构建2路42步进电机对象
s=Steppers(i2c)
#42步进电机对象使用用法,详情参看stepper.py文件
#
#s.Step(index, steps=0, direction=1,mode=4, interval=2)
#index: 0~1表示2路42步进电机
#steps: 转动步数
#direction:方向,1为正转,0为反转
#mode: 4表示4拍,8表示八拍
#interval:每拍间隔时间,单位为ms
#2路顺时针连续旋转
while True:
s.Step(0,1)
s.Step(1,1)
实验结果
将资料包示例程序的库文件全部拷贝到CanMV U盘 sdcard根目录:
运行上面主函数程序。可以看到42步进电机按指定间隔和步数旋转。最大支持2路,保证电源供电电流足够即可。
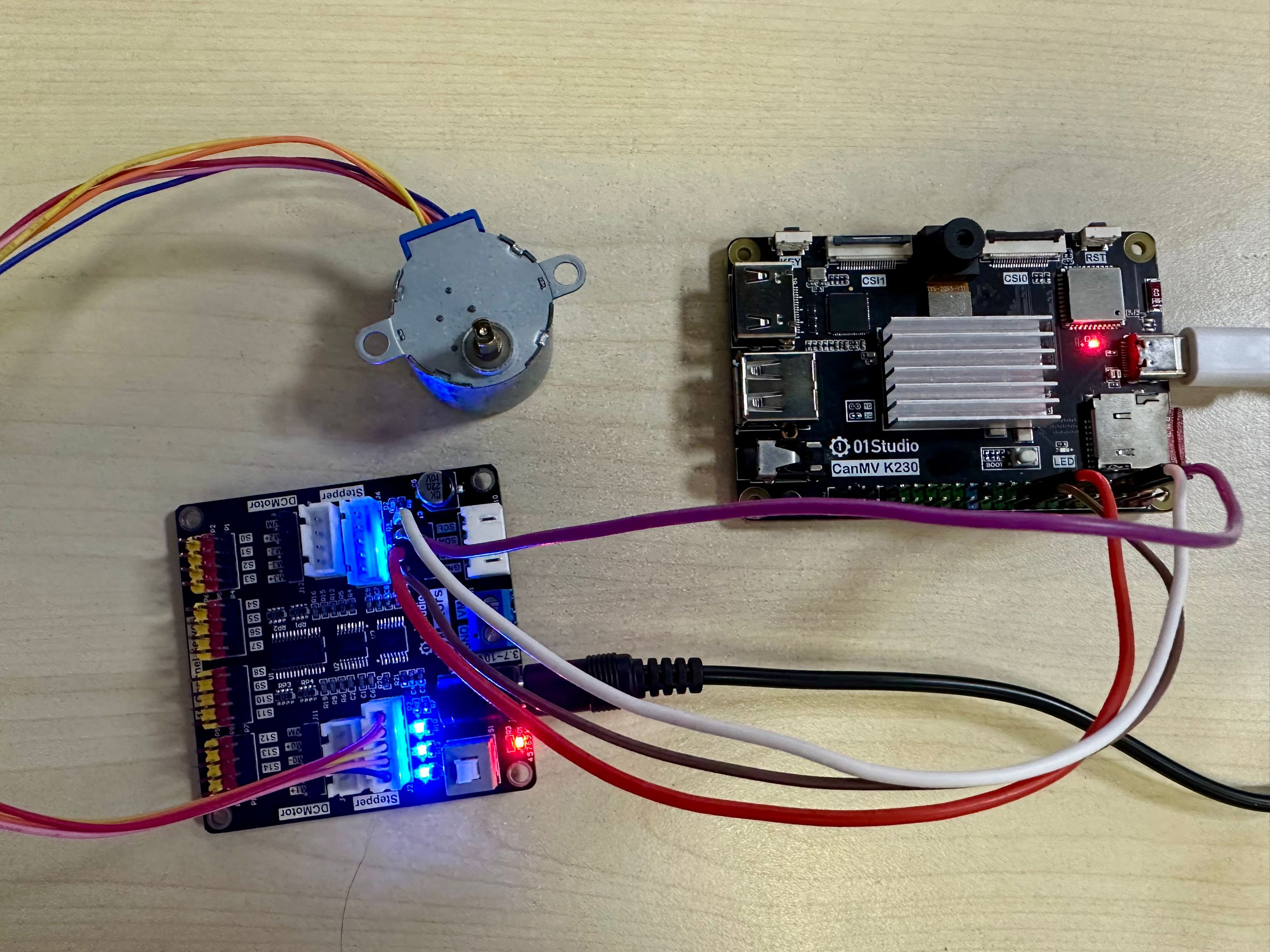
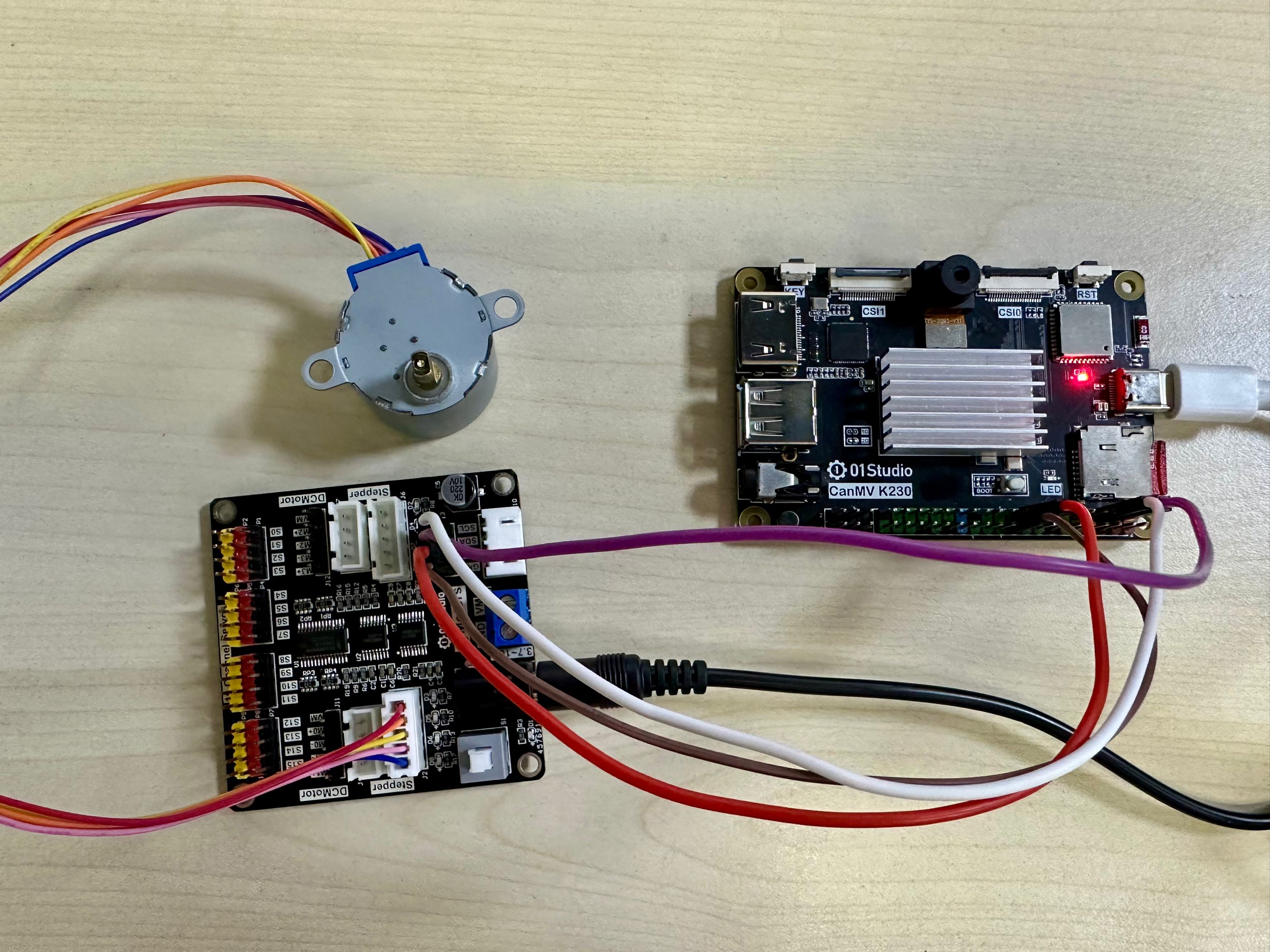
4相5线步进电机
4相5线步进电机是另一款常用的步进电机。点击购买>>,可以精准控制旋转步数。常用于3D打印机或一些机械设备精确控制场合。

pyMotors模块支持2路4相5线步进电机控制,接线如下:
Steppers_5W对象
4相5线步进电机的microppython驱动库已经封装好,位于stepper.py和pca9685.py ,只需要在主函数初始化I2C2和调用即可。
构造函数
from stepper import Steppers_5W
...
s=Steppers_5W(i2c)
构建2路4相5线电机对象。
使用方法
s.Step(index, steps=0, direction=1,mode=4, interval=2)
4相5线步进电机控制函数。
index: 值为 0~1 ,表示2个4相5线步进电机的编号;steps: 转动步数;direction: 转动方向,1为正转,0为反转;mode: 转动模式,4表示4拍,8表示八拍;interval: 每拍间隔时间,单位为ms;
运行前需要将 stepper.py和pca9685.py 文件发送到CanMV U盘 sdcard根目录。主函数代码如下:
参考代码
'''
# Copyright (c) [2025] [01Studio]. Licensed under the MIT License.
实验名称:pyMotors多功能电机模块
实验平台:01Studio CanMV K230
说明:同时控制2路4相5线步进电机
'''
from machine import I2C,FPIOA
from stepper import Steppers_5W
import time
#将GPIO11,12配置为I2C2功能
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.IIC2_SCL)
fpioa.set_function(12, FPIOA.IIC2_SDA)
i2c = I2C(2) #构建I2C对象
#print(i2c.scan())
#构建2路4相5线步进电机对象
s=Steppers_5W(i2c)
#4相5线步进电机对象使用用法,详情参看stepper.py文件
#
#s.Step(index, steps=0, direction=1,mode=4, interval=2)
#index: 0~1表示2路4相5线步进电机
#steps: 转动步数
#direction:方向,1为正转,0为反转
#mode: 4表示4拍,8表示八拍
#interval:每拍间隔时间,单位为ms
#2路顺时针连续旋转
while True:
s.Step(0,1)
s.Step(1,1)
实验结果
将资料包示例程序的库文件全部拷贝到CanMV U盘 sdcard根目录:
运行上面主函数程序。可以看到4相5线步进电机按指定间隔和步数旋转。最大支持2路,保证电源供电电流足够即可。