小车动作
前言
上一节我们学习了电机的控制,这节来学习小车的各类动作控制,如前进、后退、左转、右转。
实验目的
学习K230控制小车执行各种动作。
实验讲解
上一节我们学习了电机的控制方法,实现了对电机正转、反转、停止和转速的控制。这款小车底盘由4个电机组成,每个电机可以独立控制,通过不同的方向和速度可以实现小车的前进、后退、左转、右转功能。 这种控制方式称为差速控制小车。
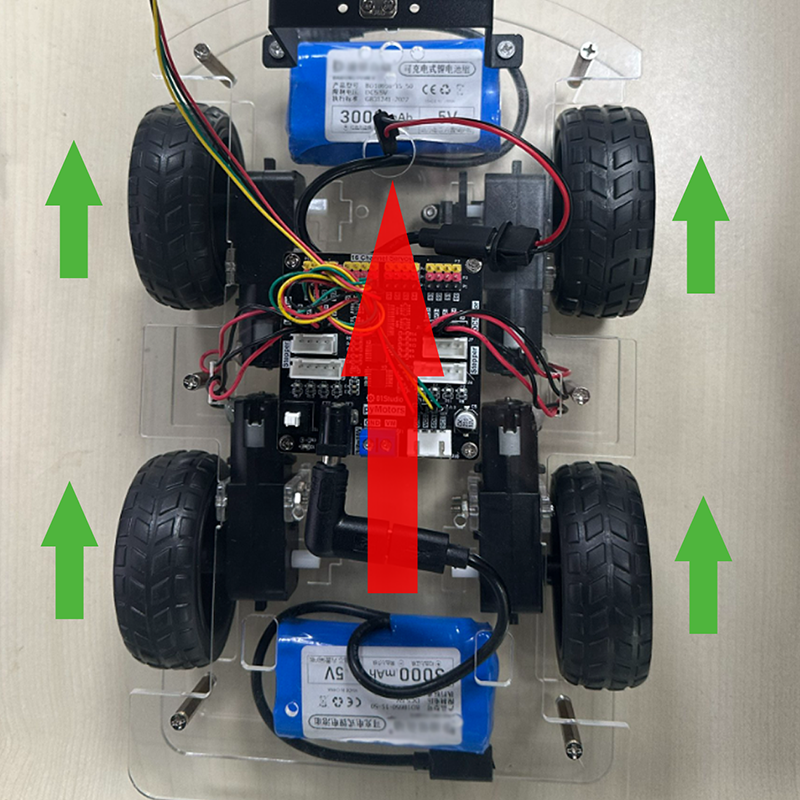
- 前进
当4个电机同时正转(向前转)时,小车前进。电机的速度越大小车的前进速度越快。
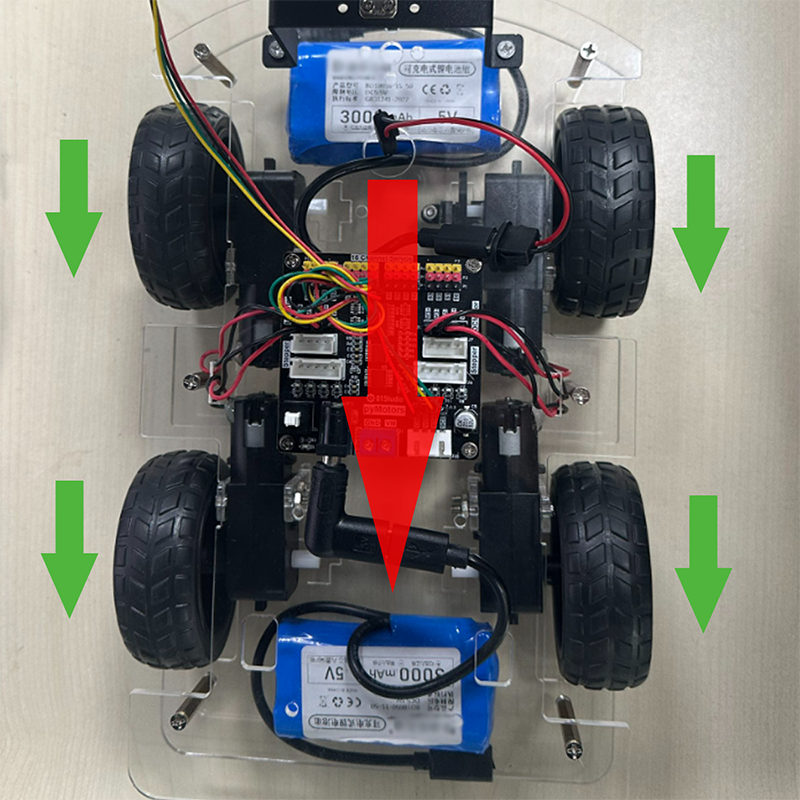
- 后退
当4个电机同时反转(向后转)时,小车后退。电机的速度越大小车的后退速度越快。
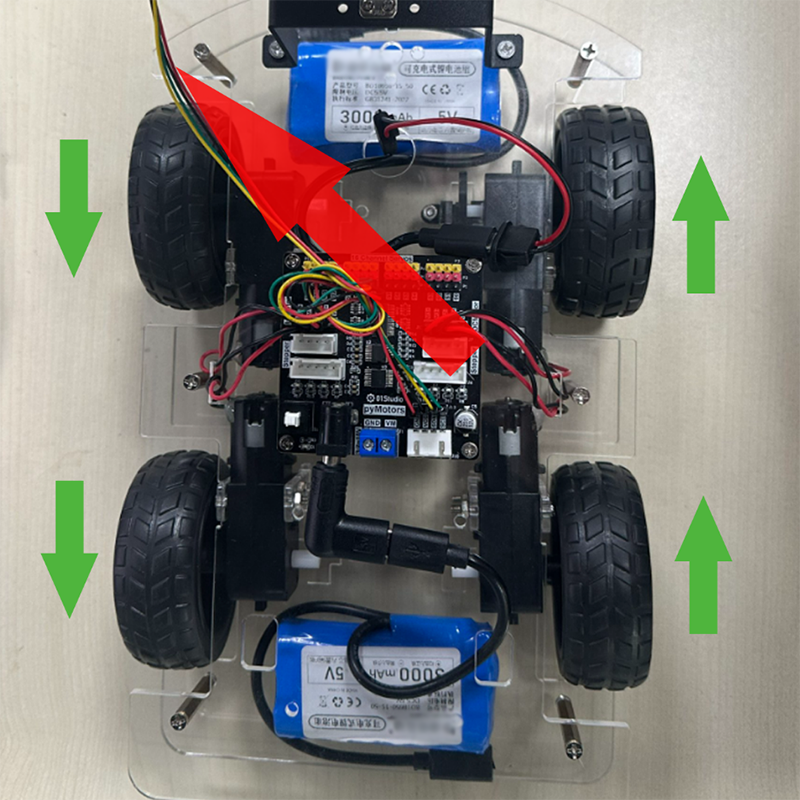
- 左转
当左侧2个电机(M0,M1)反转(向后转),右侧2个电机(M2,M3)正转(向前转),小车左转。两侧电机的速度相差越大小车的转弯角度越大。
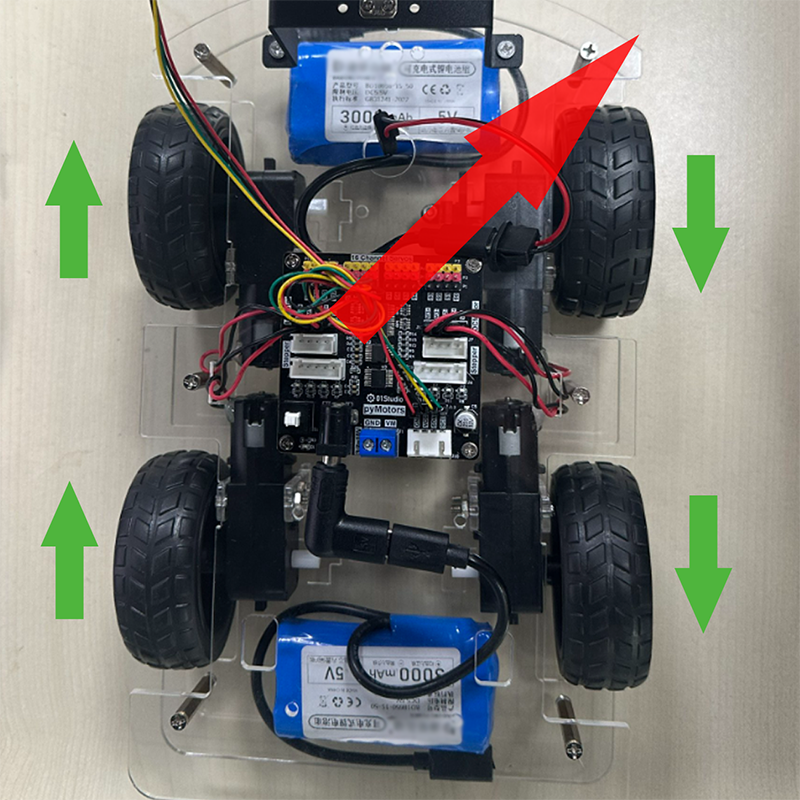
- 右转
当左侧2个电机(M0,M1)正转(向前转),右侧2个电机(M2,M3)反转(向后转),小车右转。两侧电机的速度相差越大小车的转弯角度越大。。
Motors对象
直流电机的microppython驱动库已经封装好,位于motor.py和pca9685.py ,只需要在主函数初始化I2C2和调用即可。
构造函数
from motor import Motors
...
m=Motors(i2c)
构建4路直流电机对象。
使用方法
m.speed(index, value=0)
电机控制函数。
index: 值为 0~3 ,表示4个直流电机的编号;value: 速度值。范围:-4095~4095,正负表示转向,绝对值越大速度越快;
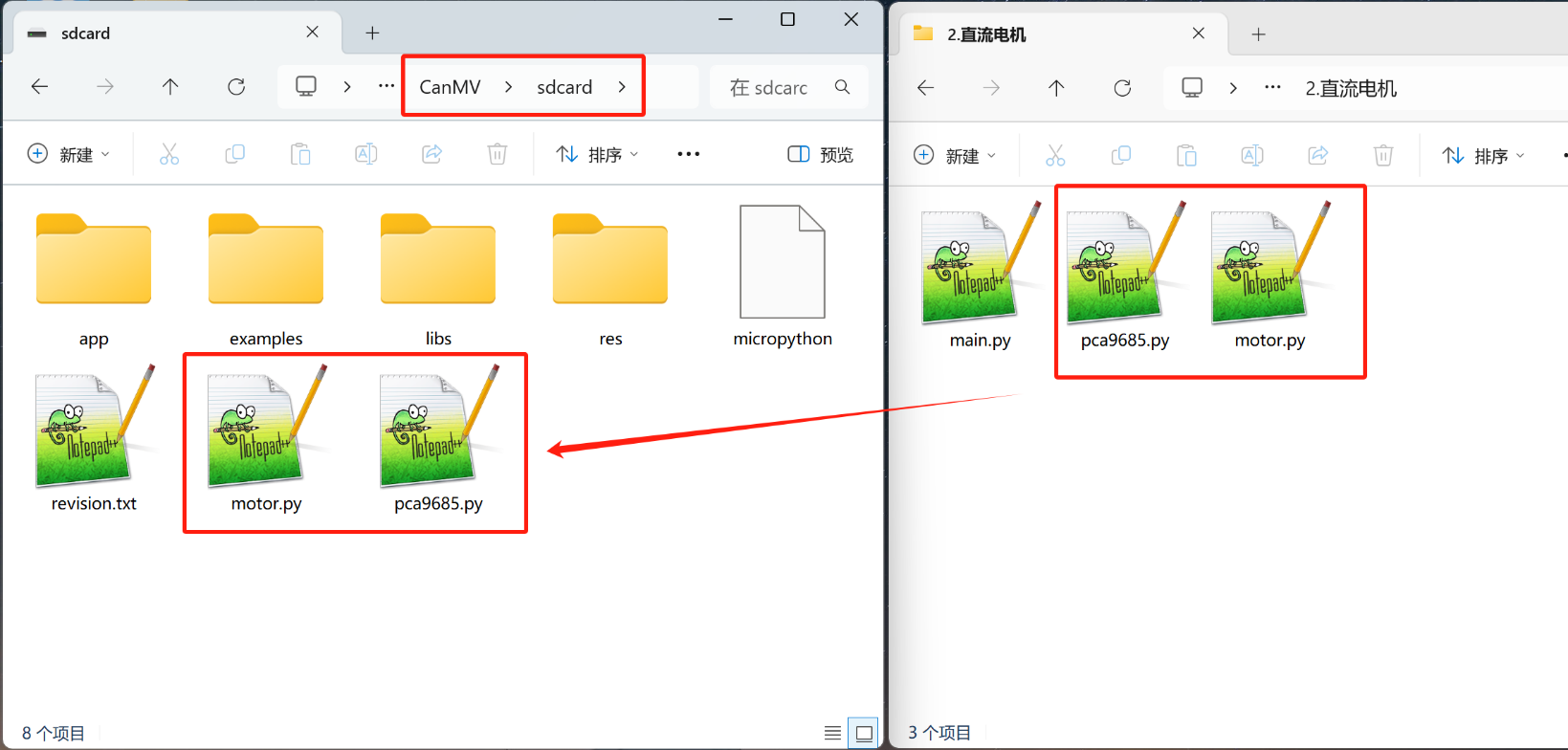
运行前需要将 motor.py和pca9685.py 文件发送到CanMV U盘 sdcard根目录。
代码编写流程如下:
参考代码
'''
# Copyright (c) [2025] [01Studio]. Licensed under the MIT License.
实验名称:小车动作控制
实验平台:01Studio CanMV K230 + 小车底盘
'''
from machine import I2C,FPIOA
from motor import Motors
import time
#将GPIO11,12配置为I2C2功能
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.IIC2_SCL)
fpioa.set_function(12, FPIOA.IIC2_SDA)
i2c = I2C(2) #构建I2C对象
#print(i2c.scan())
#构建4路直流电机对象
m=Motors(i2c)
#直流电机对象使用用法,详情参看motor.py文件
#
#m.speed(index, value=0)
#index: 0~3表示4路直流电机
#value: 速度。-4095~4095,正负表示转向,绝对值越大速度越大
#前进
def forward():
m.speed(0,3000) #直流电机0正转,速度0~4095,4095表示最快速度
m.speed(1,3000)
m.speed(2,3000)
m.speed(3,3000)
#后退
def backward():
m.speed(0,-3000) #直流电机0反转,速度0~-4095,-4095表示反转最快速度
m.speed(1,-3000)
m.speed(2,-3000)
m.speed(3,-3000)
#左转
def turn_left():
m.speed(0,-3000)
m.speed(1,-3000)
m.speed(2,3000)
m.speed(3,3000)
#右转
def turn_right():
m.speed(0,3000)
m.speed(1,3000)
m.speed(2,-3000)
m.speed(3,-3000)
#停止
def stop():
m.speed(0,0) #直流电机0停止
m.speed(1,0)
m.speed(2,0)
m.speed(3,0)
forward() #前进
time.sleep(3)
backward() #后退
time.sleep(3)
turn_left() #左 转
time.sleep(3)
turn_right() #右转
time.sleep(3)
stop()
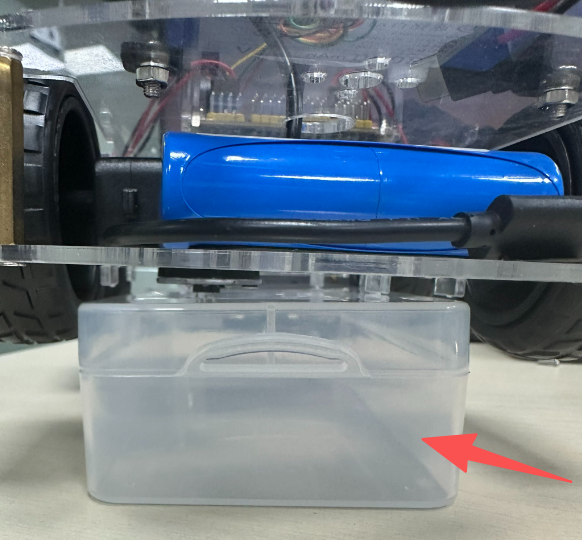
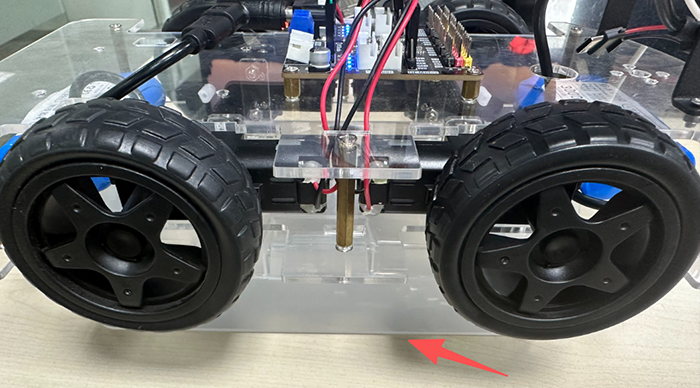
调试技巧
为了方便调试,避免电机转动导致小车跑动,可以在小车底盘下方放置一个尺寸合适的盒子,将轮胎撑起,然后做相关调试。
实验结果
将资料包示例代码配套的 motor.py和pca9685.py 库文件发送到CanMV U盘 sdcard根目录。
将代码以main.py发送到开发板离线运行, 然后放置在底面,使用前面的锂电池给K230上电,可以看到小车一次完成前进,后退,左转,右转动作。
