六轴加速度计(MPU6050)
前言
MPU6050是一款高性能的6轴(三轴加速度+三轴陀螺仪)传感器模块,用于测试物体的运动姿态,I2C接口,本节我们就通过编程来学习读取MPU6050传感器的原始数据。
实验平台
麦哲伦MicroPython开发套件。MPU6050传感器位于开发板左侧。
实验目的
通过编程实现MPU6050六轴传感器数据获取,并显示在LCD上。
实验讲解
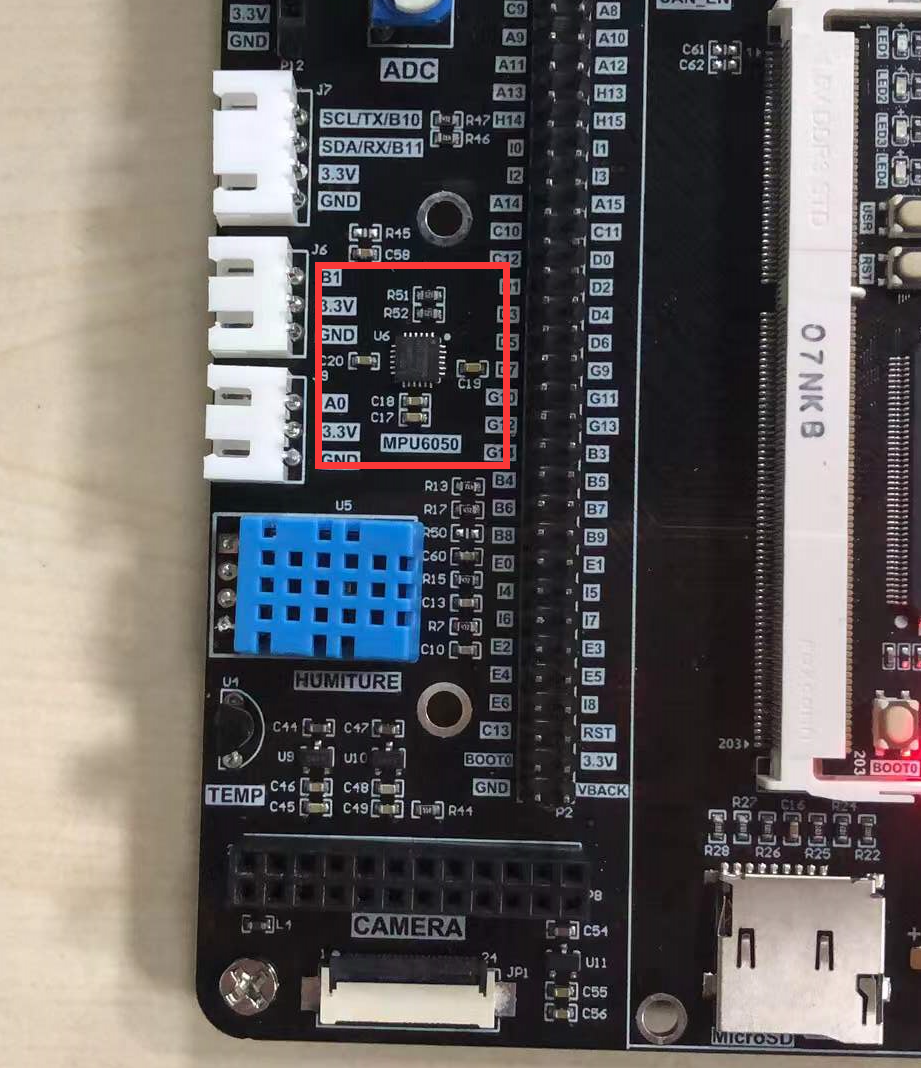
MPU6050传感器位于麦哲伦开发板的左边中间位置:
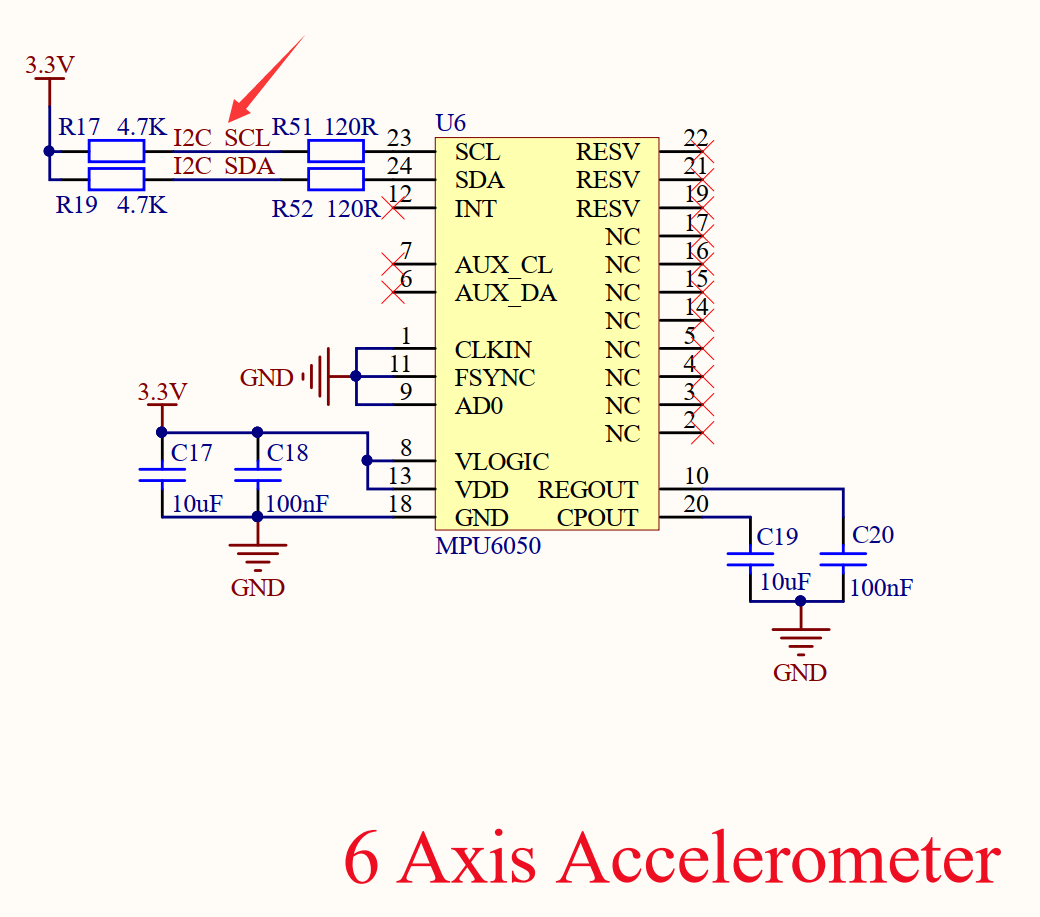
从原理图可以看到连接到了麦哲伦主控的I2C1接口:
| 功能参数 | |
|---|---|
| 芯片型号 | MPU6050 |
| 供电电压 | 3.3V |
| 控制方式 | I2C总线 (默认地址:0x68) |
| 测量维度 | 加速度:3维 / 陀螺仪:3维 |
| 加速度测量范围 | ±2/±4/±8/±16g |
| 陀螺仪测量范围 | ±250/±500/±1000/±2000°/s |
| ADC位数 | 16位 |
| 温度传感器 | 测量范围:-40℃~85℃(精度:±1℃) |
上面介绍可以看到,MPU6050是一款通过I2C接口驱动的传感器。连接到开发板主控的I2C1接口。我们通过前面学习的I2C接口使用的方式,即可以对该模块实现数据通讯。
Micropython模块已经写好,位于例程文件夹里面的mpu6050.py文件,我们来看看其构造函数和使用方法
mpu6050对象
构造函数
mpu6050.accel(i2c)
构建MPU6050对象。
参数说明:
i2c:定义好的I2C对象。
使用方法
accelerometer.get_values()
获取测量数据。返回元组如下: vals[“AcX”]: 加速度X轴值; vals [“AcY”] 加速度Y轴值; vals [“AcZ”] 加速度Z轴值; vals [“GyX”] 陀螺仪X轴值; vals [“GyY”] 陀螺仪Y轴值; vals [“GyZ”] 陀螺仪Z轴值;
理解了MPU6050传感器原理和对象使用方法后,我们可以整理出编程思路,流程图如下 :
参考代码
'''
实验名称:MPU6050六轴传感器
版本:v1.0
平台:麦哲伦开发套件
作者:01Studio
说明:通过编程获MPU6050的6轴(3轴加速度+3轴陀螺仪)和温度数据,并在LCD上显示。
'''
#导入相关模块
import mpu6050,time,gc,time
from machine import SoftI2C,Pin
from tftlcd import LCD43R
#定义常用颜色
WHITE=(255,255,255)
BLACK = (0,0,0)
#初始化LCD
d=LCD43R(portrait=4) #竖屏
d.fill(WHITE) #填充白色
#MPU6050初始化,这里使用软件I2C
i2c = SoftI2C(sda=Pin("H5"), scl=Pin("H4"))
accelerometer = mpu6050.accel(i2c)
#显示标题
d.printStr('01Studio MPU6050', 40, 10, BLACK, size=4)
while True:
#获取传感器信息
value=accelerometer.get_values()
d.printStr('Ac-X:'+str(value["AcX"]), 10, 100, BLACK, size=4)
d.printStr('Ac-Y:'+str(value["AcY"]), 10, 150, BLACK, size=4)
d.printStr('Ac-Z:'+str(value["AcZ"]), 10, 200, BLACK, size=4)
d.printStr('Ac-X:'+str(value["AcX"]), 10, 100, BLACK, size=4)
d.printStr('Ac-Y:'+str(value["AcY"]), 10, 150, BLACK, size=4)
d.printStr('Ac-Z:'+str(value["AcZ"]), 10, 200, BLACK, size=4)
#显示陀螺仪数据
d.printStr('Gy-X:'+str(value["GyX"]), 10, 300, BLACK, size=4)
d.printStr('Gy-Y:'+str(value["GyY"]), 10, 350, BLACK, size=4)
d.printStr('Gy-Z:'+str(value["GyZ"]), 10, 400, BLACK, size=4)
print(value)
time.sleep_ms(100) #延时
实验结果
将资料包的mpu6050.py文件上传到开发板文件系统,运行程序,可以看到LCD显示采集到的MPU6050六维数据值。
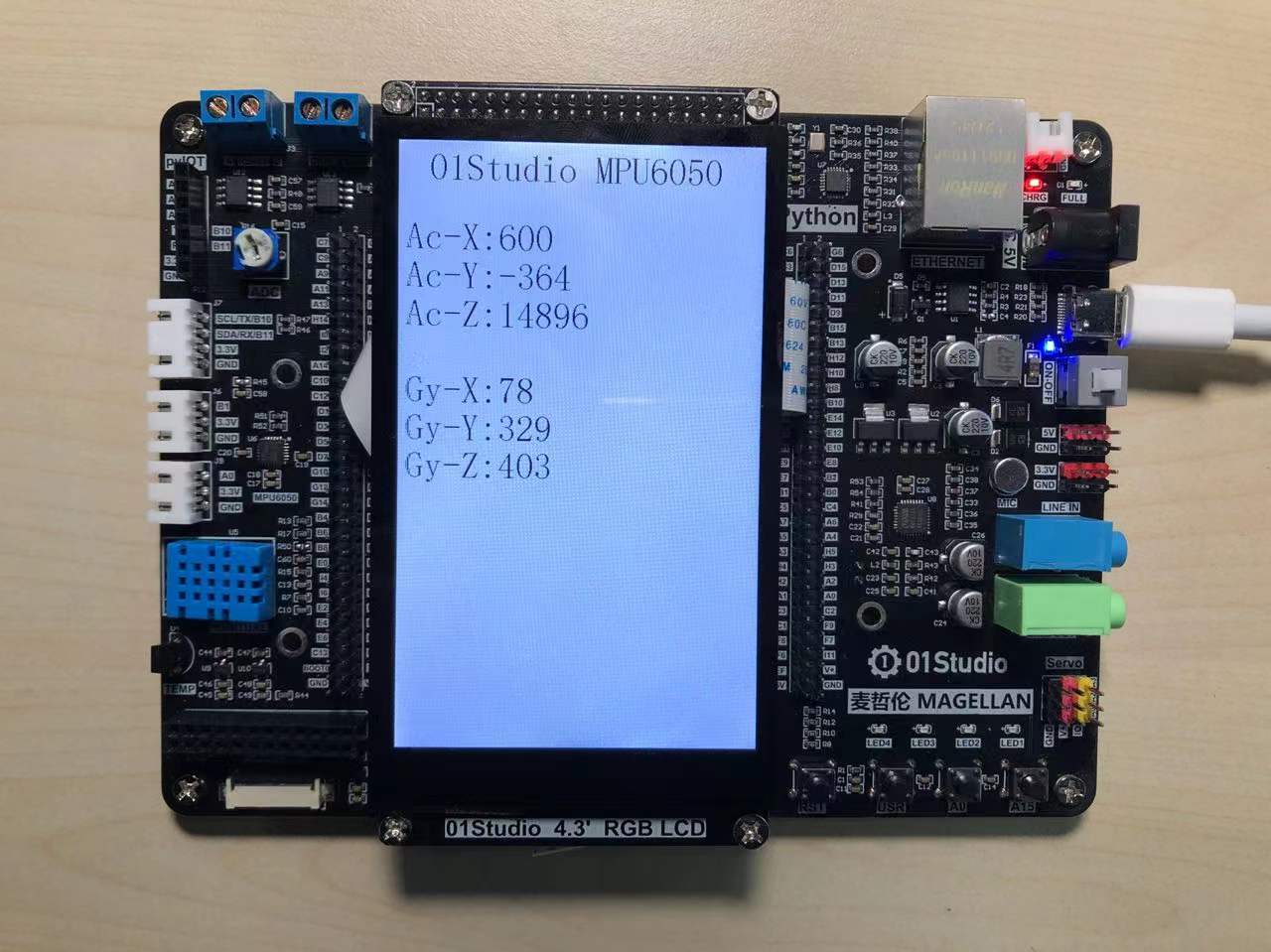
拿起开发板并往各个方向转动,可以看到相关数值在变化:
本节通过micropython编程轻松实现了对MPU6050六轴传感器数据采集,但发现采集的是原始数据,因此我们可以用这些数据来进行简单的方向识别。类似于手机的重力感应来旋转屏幕相关的应用。
另外可以看到数据的跳动变化是非常快的,实际应用可以加入数据滤波处理,有兴趣的小伙伴可以自行研究。