空心杯电机(PWM)
前言
PWM(脉冲宽度调制)就是一个特定信号输出,主要用于输出不同频率、占空比(一个周期内高电平出现时间占总时间比例)的方波。以实现固定频率或平均电压输出。
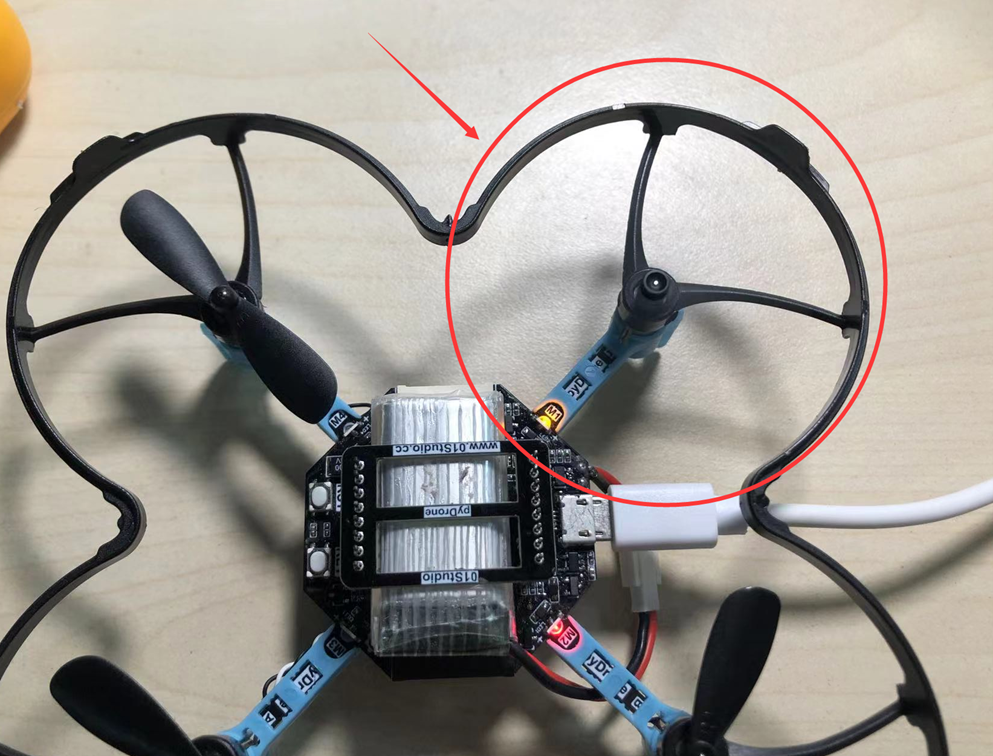
pyDrone上有4个716空心杯电机(四轴名称的由来)。今天我们试试用python pwm代码来控制电机的转速,从而学习电机控制原理。
实验目的
通过PWM信号控制pyDrone上的空心杯电机转速。
实验讲解
电机控制主要用到PWM(脉冲宽度调制),GPIO输出不同频率、占空比(一个周期内高电平出现时间占总时间比例)的方波。以实现固定频率或平均电压输出。
如下图,可以看到当频率固定时,占空比越大(高电平占时间越长),等效电压越高,电机转速就越快。

我们使用电机M1来测试,从下面原理图可以看到电机M1驱动电路连接到主控模块(ESP32-S3模块)的GPIO4。
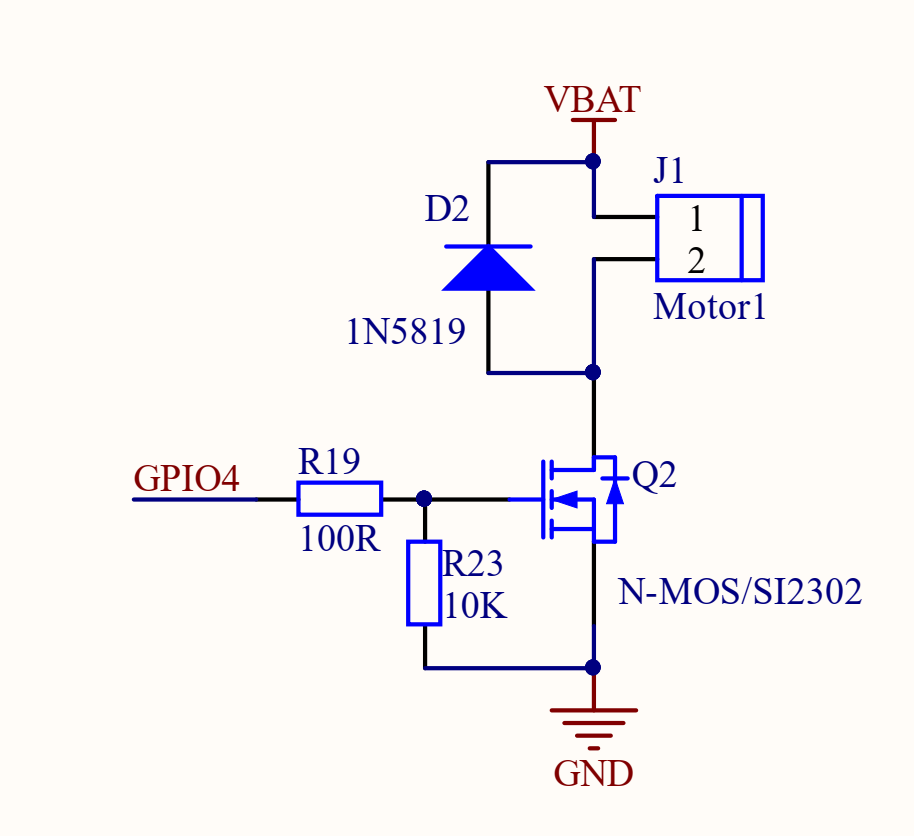
PWM 可以通过ESP32-S3所有GPIO引脚输出. 所有通道都有1个特定的频率,从0到40M之间(单位是Hz)。占空比的值为0至1023之间。在本实验中我们用到引脚4。先来看看PWM对象和使用方法。
PWM对象
构造函数
pwm = machine.PWM(machine.Pin(id), freq, duty)
构建PWM对象,PWM对象位于machine模块下。
machine.Pin(id):引脚编号,如Pin(12);freq:PWM频率,单位:Hz, 范围:1-40MHz;duty:PWM占空比,范围:0-1023;
使用方法
pwm.freq([value])
设置频率。不传参数返回当前频率。
pwm.duty([value])
设置占空比。不传参数返回当前占空比。
pwn.deinit()
注销PWM。
更多用法请阅读官方文档:
https://docs.micropython.org/en/latest/library/machine.PWM.html#machine-pwm
由于这个主要是调占空比,因此我们只需要固定一个频率即可,飞控通常用10k~15kHz,我们这里用固定10KHz频率。
结合上述讲解,总结出代码编写流程图如下:
参考代码
'''
实验名称:PWM
版本:v1.0
日期:2022.4
作者:01Studio
说明:通过不同频率的PWM信号输出,控制空心杯电机M1的转速。
'''
from machine import Pin, PWM
import time
# 初始化PWM, 频率10000Hz,占空比0(占空比范围:0~1023)。
M1 = PWM(Pin(4), freq = 10000 ,duty=0)
#占空比200输出
M1.duty(200)
time.sleep(1)
#占空比500输出
M1.duty(500)
time.sleep(1)
#占空比1000输出
M1.duty(1000)
time.sleep(1)
#停止
M1.deinit()
实验结果
在Thonny IDE运行程序,可以看到电机M1以不同转速旋转。
有条件的朋友可以使用示波器测量pyWiFi-ESP32-S3的引脚4接口,观察信号波形的变化:

本节用顶层方式实现了电机控制,旨在了解电机控制原理。在飞控实际飞行过程中对控制实时速度要求非常高。