巡线小车
前言
本节我们结合前面机器视觉的机器人巡线(实线)、PID控制原理相关知识来实现小车巡线行驶。

实验目的
编程实现K230视觉巡线小车。
实验讲解
本节的巡线案例是基于颜色识别中的机器人巡线案例,原理是根据摄像头采集到的图像直线与中心偏离的位置计算出偏离角度。然后再通过PID算法让小车始终沿着黑线行驶。
本实验使用01Studio巡线赛道 点击购买>>,自己有类似的赛道也可以使用。

本实验用的其它相关教程请参考下方链接,这里不再重复:
代码编写流程如下:
参考代码
'''
实验名称:K230巡线小车
实验平台:01Studio CanMV K230 + 小车底盘
'''
import time, os, sys, math
from media.sensor import * #导入sensor模块,使用摄像头相关接口
from media.display import * #导入display模块,使用display相关接口
from media.media import * #导入media模块,使用meida相关接口
#舵机相关库
from machine import I2C,FPIOA
from motor import Motors
import time
#将GPIO11,12配置为I2C2功能
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.IIC2_SCL)
fpioa.set_function(12, FPIOA.IIC2_SDA)
i2c = I2C(2,freq=100000) #构建I2C对象
# 构建4路直流电机对象
m = Motors(i2c)
move_speed = 1800 #默认前进速度,PWM值,最大4095,太大容易跑飞
#小车停止
def stop():
m.speed(0,0)
m.speed(1,0)
m.speed(2,0)
m.speed(3,0)
# PID参数 (水平和垂直方向分别设置)
class PID:
def __init__(self, p=0.05, i=0.01, d=0.01):
self.kp = p
self.ki = i
self.kd = d
self.target = 0
self.error = 0
self.last_error = 0
self.integral = 0
self.output = 0
def update(self, current_value):
self.error = self.target - current_value
#坐标变化小于10不响应
if abs(self.error)<10:
return 0
self.integral += self.error
derivative = self.error - self.last_error
# 计算PID输出
self.output = (self.kp * self.error) + (self.ki * self.integral) + (self.kd * derivative)
self.last_error = self.error
return self.output
def set_target(self, target):
self.target = target
self.integral = 0
self.last_error = 0
# 初始化X轴PID控制器
x_pid = PID(p=0.05, i=0.0, d=0.001) # 水平方向PID
# 设置X轴目标位置,0度偏移。
x_pid.set_target(0)
#3.5寸mipi屏分辨率定义
lcd_width = 800
lcd_height = 480
# 追踪黑线。使用 [(128, 255)] 追踪白线.
GRAYSCALE_THRESHOLD = [(0, 95)]
# 下面是一个roi【区域】元组列表。每个 roi 用 (x, y, w, h)表示的矩形。
#采样图像为640x480,列表把roi把图像分成3个矩形,越靠近的摄像头视野(通常为图像下方)的矩形权重越大。
ROIS = [ # [ROI, weight]
(0, 400, 640, 80, 0.7), # 可以根据不同机器人情况进行调整。
(0, 200, 640, 80, 0.3),
(0, 0, 640, 80, 0.1)
]
# 计算以上3个矩形的权值【weight】的和,和不需要一定为1.
weight_sum = 0
for r in ROIS: weight_sum += r[4] # r[4] 为矩形权重值.
time.sleep_ms(100)
sensor = Sensor(width=1280, height=960) #构建摄像头对象,将摄像头长宽设置为4:3
sensor.reset() #复位和初始化摄像头
sensor.set_framesize(width=640, height=480) #设置帧大小,默认通道0
sensor.set_pixformat(Sensor.GRAYSCALE) #设置输出图像格式,默认通道0
Display.init(Display.ST7701, width=lcd_width, height=lcd_height, to_ide=True) #同时使用mipi屏和IDE缓冲区显示图像
MediaManager.init() #初始化media资源管理器
sensor.run() #启动sensor
clock = time.clock()
while True:
################
## 这里编写代码 ##
################
clock.tick()
img = sensor.snapshot() #拍摄一张图片
centroid_sum = 0
blob_detected = False # 标记是否检测到黑线
for r in ROIS:
blobs = img.find_blobs(GRAYSCALE_THRESHOLD, roi=r[0:4], merge=True) # r[0:4] 是上面定义的roi元组.
if blobs:
blob_detected = True
# Find the blob with the most pixels.
largest_blob = max(blobs, key=lambda b: b.pixels())
# Draw a rect around the blob.
img.draw_rectangle(largest_blob.rect())
img.draw_cross(largest_blob.cx(),
largest_blob.cy())
centroid_sum += largest_blob.cx() * r[4] # r[4] 是每个roi的权重值.
#丢线处理:未检测到黑线 → 立即停车(核心解决偶发识别失败)
if not blob_detected:
print("未检测到黑线,停车!")
stop()
img.draw_string_advanced(2,2,50, 'STOP', color=(255,255,255))
#显示图片,仅用于LCD居中方式显示
Display.show_image(img, x=round((lcd_width-sensor.width())/2),y=round((lcd_height-sensor.height())/2))
continue
center_pos = (centroid_sum / weight_sum) # 确定直线的中心.
# 将直线中心位置转换成角度,便于机器人处理.
deflection_angle = 0
# 使用反正切函数计算直线中心偏离角度。可以自行画图理解
#权重X坐标落在图像左半部分记作正偏,落在右边部分记为负偏,所以计算结果加负号。
deflection_angle = -math.atan((center_pos-320)/240) #采用图像为 640*480时候使用
# 将偏离值转换成偏离角度.
deflection_angle = math.degrees(deflection_angle)
# 计算偏离角度后可以控制机器人进行调整.
print("Turn Angle: %f" % deflection_angle)
# 更新水平(X轴)角度
x_output = x_pid.update(deflection_angle)
print(x_output)
#控制左右电机转速
left_speed = min(int(move_speed + x_output*1000),4095)
right_speed = min(int(move_speed - x_output*1000),4095)
print(left_speed,right_speed)
# 驱动电机
m.speed(0, left_speed)
m.speed(1, left_speed)
m.speed(2, right_speed)
m.speed(3, right_speed)
# LCD显示偏移角度,scale参数可以改变字体大小
img.draw_string_advanced(2,2,30, str('%.1f' % deflection_angle)+"'", color=(255,255,255))
img.draw_string_advanced(2,50,30, 'L: '+str(left_speed), color=(255,255,255))
img.draw_string_advanced(2,90,30, 'R: '+str(right_speed), color=(255,255,255))
#显示图片,仅用于LCD居中方式显示
Display.show_image(img, x=round((lcd_width-sensor.width())/2),y=round((lcd_height-sensor.height())/2))
print(clock.fps()) #打印FPS
代码讲解
- 调整下方的阈值95的值,可以适应不同光线下黑线的识别准确率。
# 追踪黑线。使用 [(128, 255)] 追踪白线.
GRAYSCALE_THRESHOLD = [(0, 95)]
- 小车默认前进速度 move_speed ,增大此值能提升小车行驶速度,单PID控制参数需要做相应调整,否则任意跑飞冲出赛道
move_speed = 1800 #默认前进速度,PWM值,最大4095,太大容易跑飞
实验结果
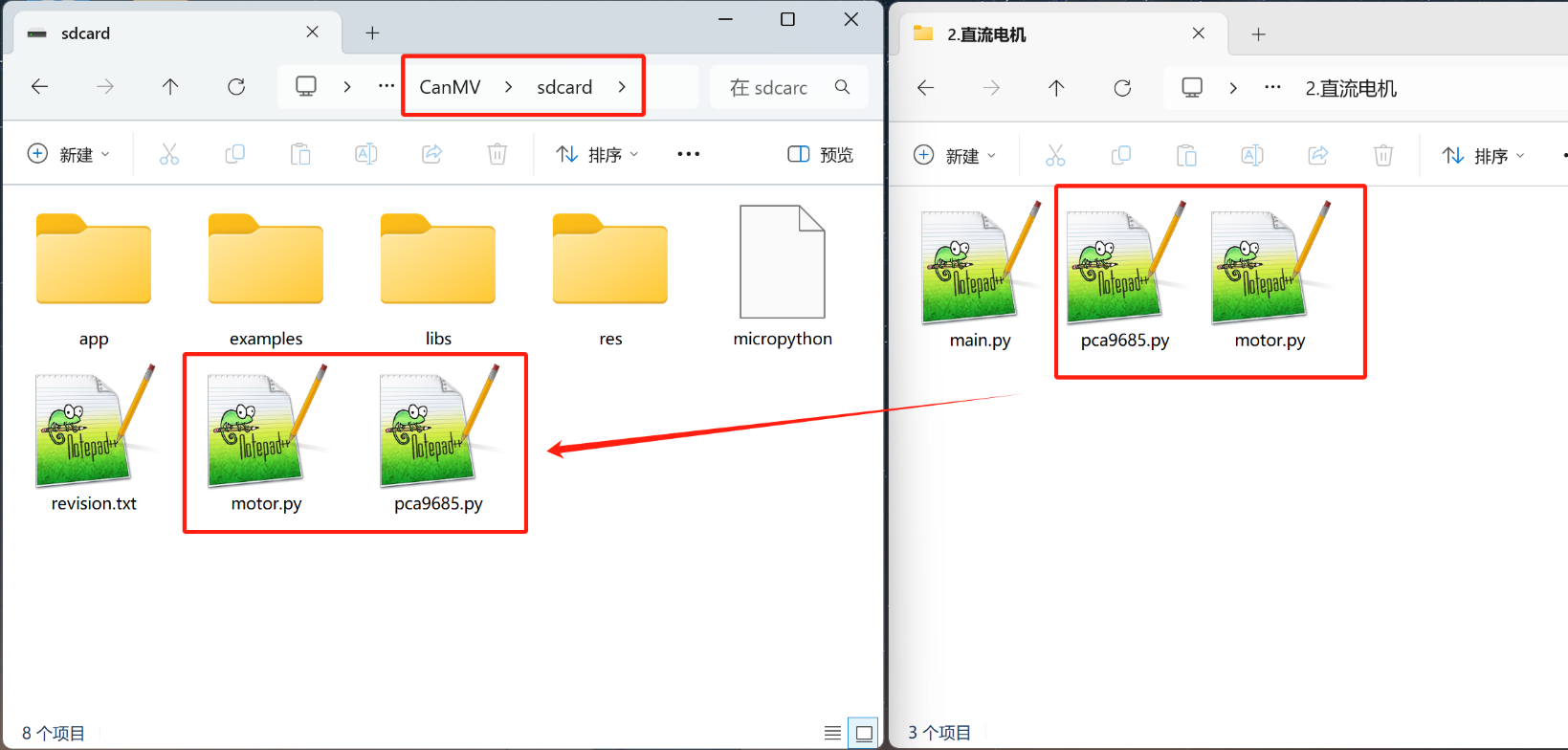
将资料包示例代码配套的 motor.py和pca9685.py 库文件发送到CanMV U盘 sdcard根目录。
将代码以main.py发送到开发板离线运行
将小车放置在赛道上,K230开发板角度调整到45°左右。
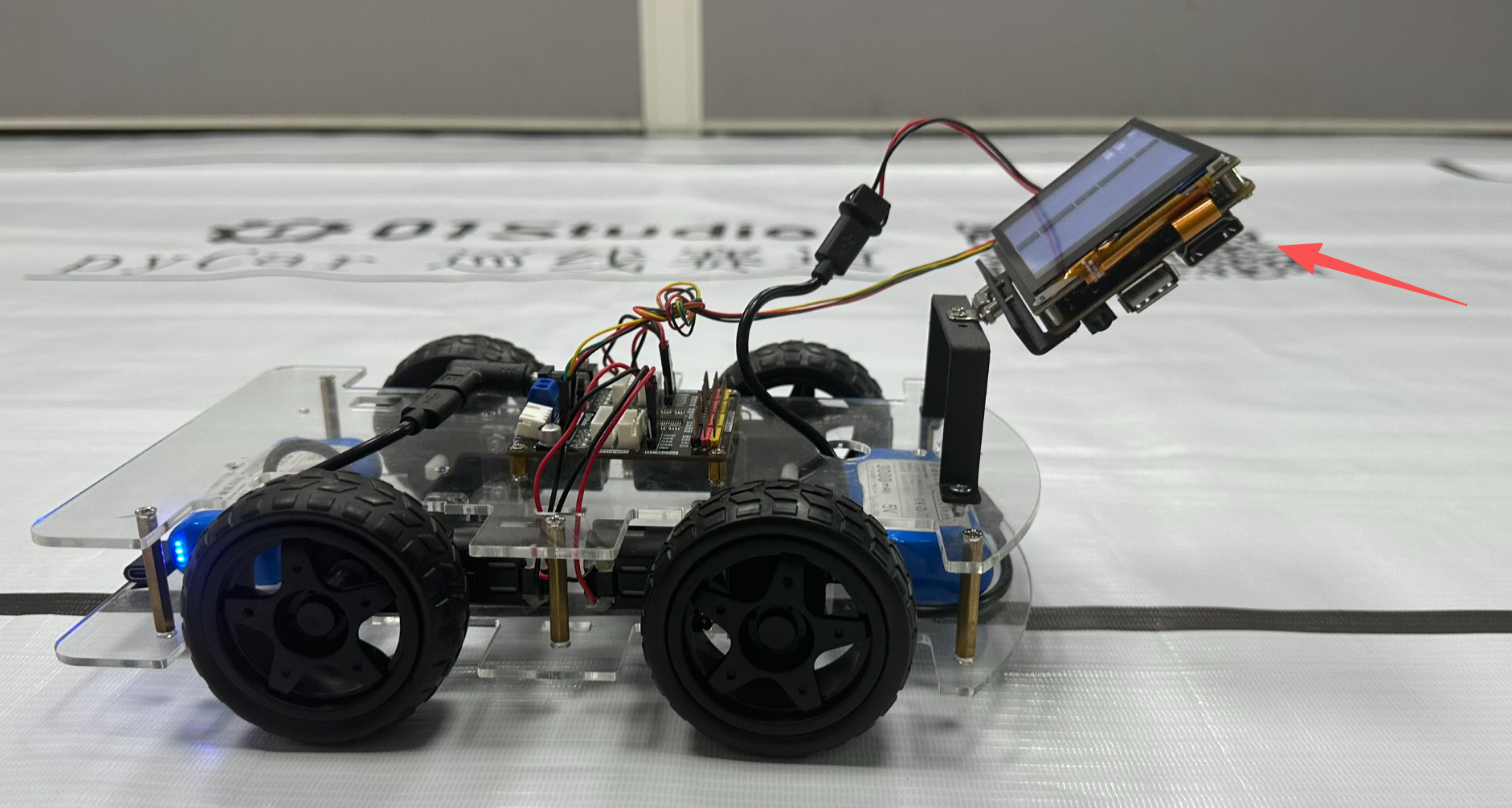
然后给K230上电,可以看到小车自动巡线行驶。
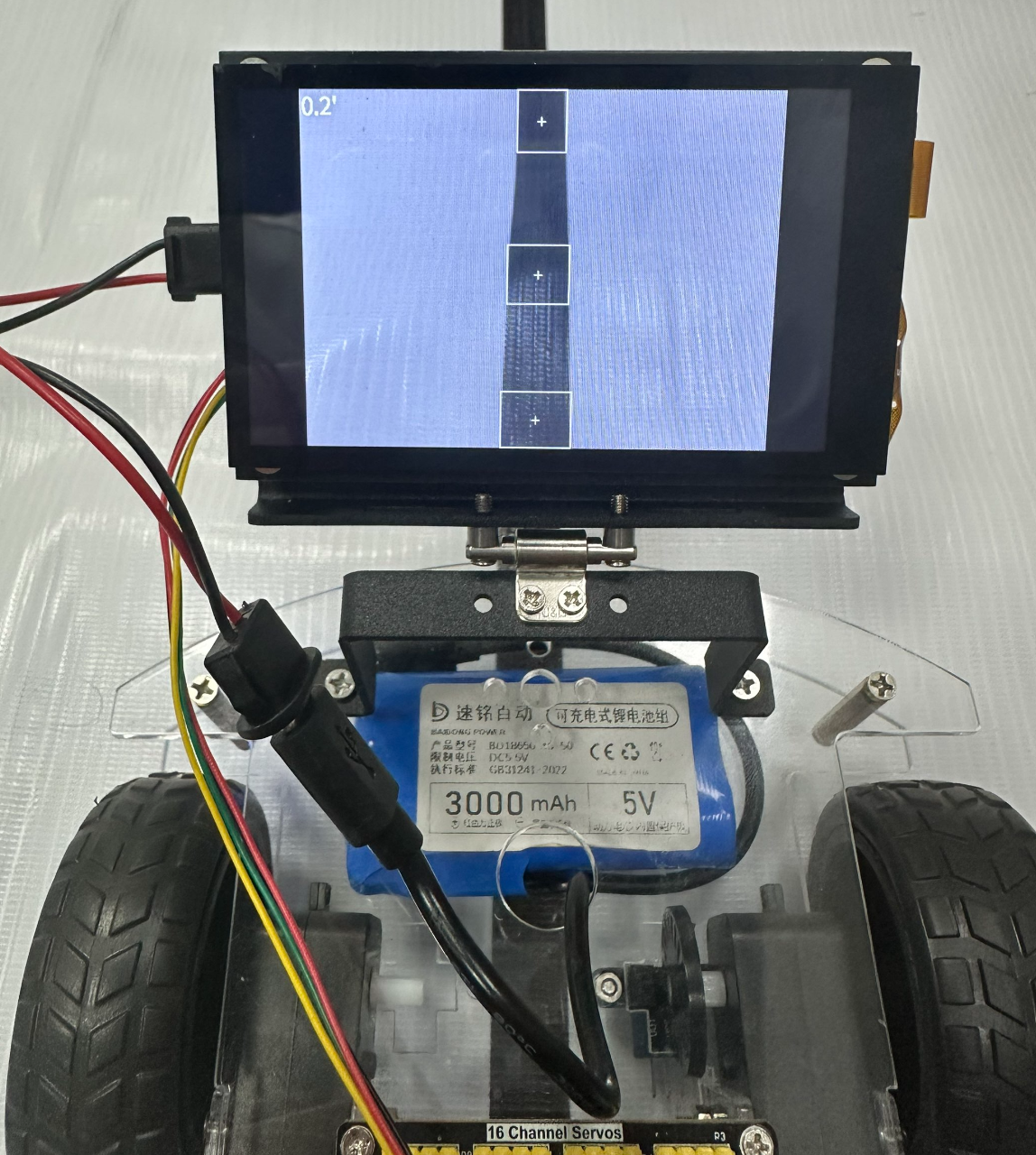
- 无偏移
当黑线无偏移时,偏移角度接近0°。
- 左偏
当小车相当于黑线往左边偏移时,偏移角度为负。

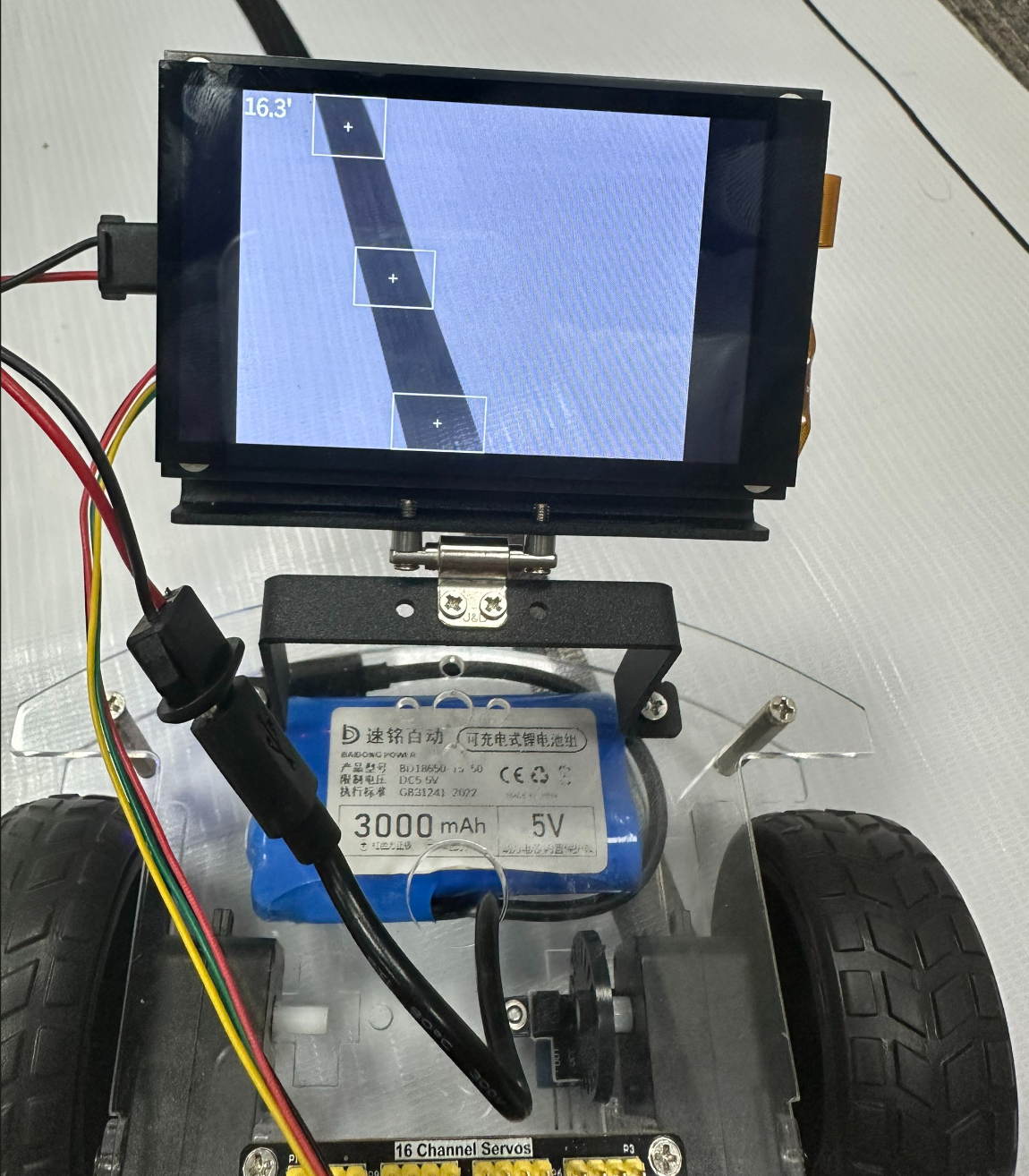
- 右偏
当小车相当于黑线往右边偏移时,偏移角度为正。