蓝牙遥控车
前言
pyCar基于乐鑫ESP32,这款主控支持WiFi和蓝牙(BLE),本节我们就结合01科技pyController遥控手柄,实现蓝牙通讯,打造一台蓝牙遥控车。
实验平台
pyCar和pyController。

实验目的
编程实现手柄通过蓝牙方式控制pyCar。
实验讲解
ESP32固件集成了BLE库,支持低功耗蓝牙(BLE)主从机功能。关于BLE的应用细节不会在本节内容展开,这里我们只需要搞清楚主机(central)和从机(peripheral)的概念区别即可,蓝牙设备在连接过程如下:
从机发起广播 – 主机搜索广播的设备 – 发起连接 – 连接成功后通讯
一般来说子设备通常作为从机,控制设备作为主机,比如我有一个蓝牙耳机(从机),开机后发起广播,而手机(主机)在搜索,搜索到这个蓝牙耳机后就发起连接,连接成功后相互通讯。
本节中,我们将小车设定从机,上电后发出广播,广播名称设为“pyCar”,然后pyController手柄作为主机,上电后不断搜索周围的小车设备,搜索后发起连接,连接成功后将手柄摇杆和按键原始数据发送给小车,小车接收到数据后执行各种动作。
关于小车移动动作前面章节已经有详细讲解,这里不再重复,具体参考:
代码编写流程如下:
参考代码
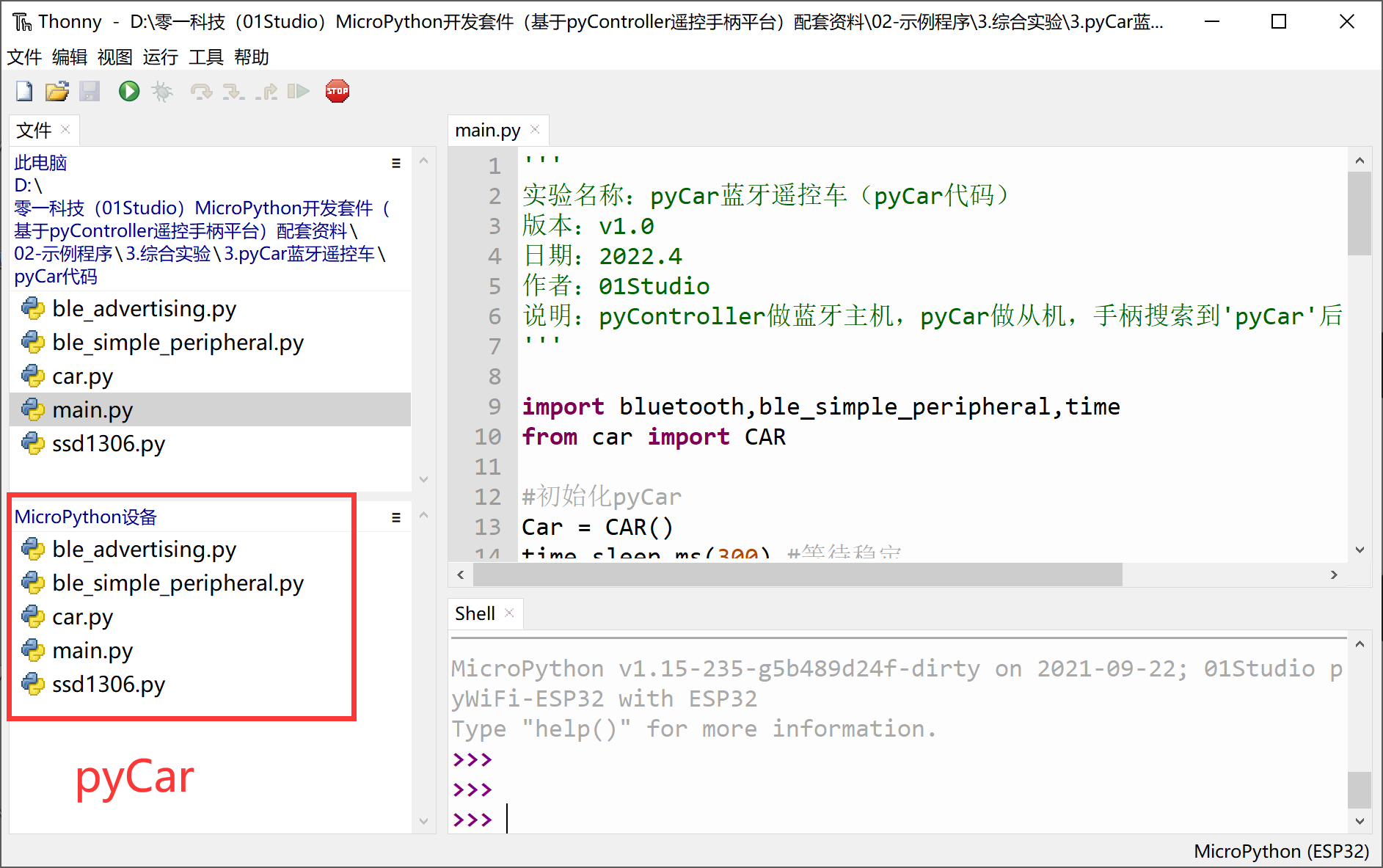
pyCar小车(蓝牙从机)代码
main.py代码
'''
实验名称:pyCar蓝牙遥控车(pyCar代码)
版本:v1.0
日期:2022.4
作者:01Studio
说明:pyController做蓝牙主机,pyCar做从机,手柄搜索到'pyCar'后发起连接,然后控制。
'''
import bluetooth,ble_simple_peripheral,time
from car import CAR
#初始化pyCar
Car = CAR()
time.sleep_ms(300) #等待稳定
#初始化蓝牙BLE从机,广播名称为pyCar
ble = bluetooth.BLE()
p = ble_simple_peripheral.BLESimplePeripheral(ble,name='pyCar')
#车灯状态
light_state = 0
#接收到蓝牙数据处理函数
def on_rx(v):
global light_state
#串口打印接收到的数据
#print("RX:", v)
#对收到的手柄8字节数据进行判断
if v[5]==40: #B键被按下,开车灯
Car.light(1)
if v[5]==72: #A键被按下,关车灯
Car.light(0)
if v[5]==0: #上键被按下,前进
Car.forward()
if v[5]==4: #下键被按下,后退
Car.backward()
if v[5]==6: #左键被按下,左转
Car.turn_left(mode=1)
if v[5]==2: #右键被按下,右转
Car.turn_right(mode=1)
if v[5]==8: #没按键按下,停止
Car.stop()
#注册从机接收回调函数,收到数据会进入on_rx函数。
p.on_write(on_rx)
#系统会自动广播, 连接断开后重新自动广播。
while True:
pass
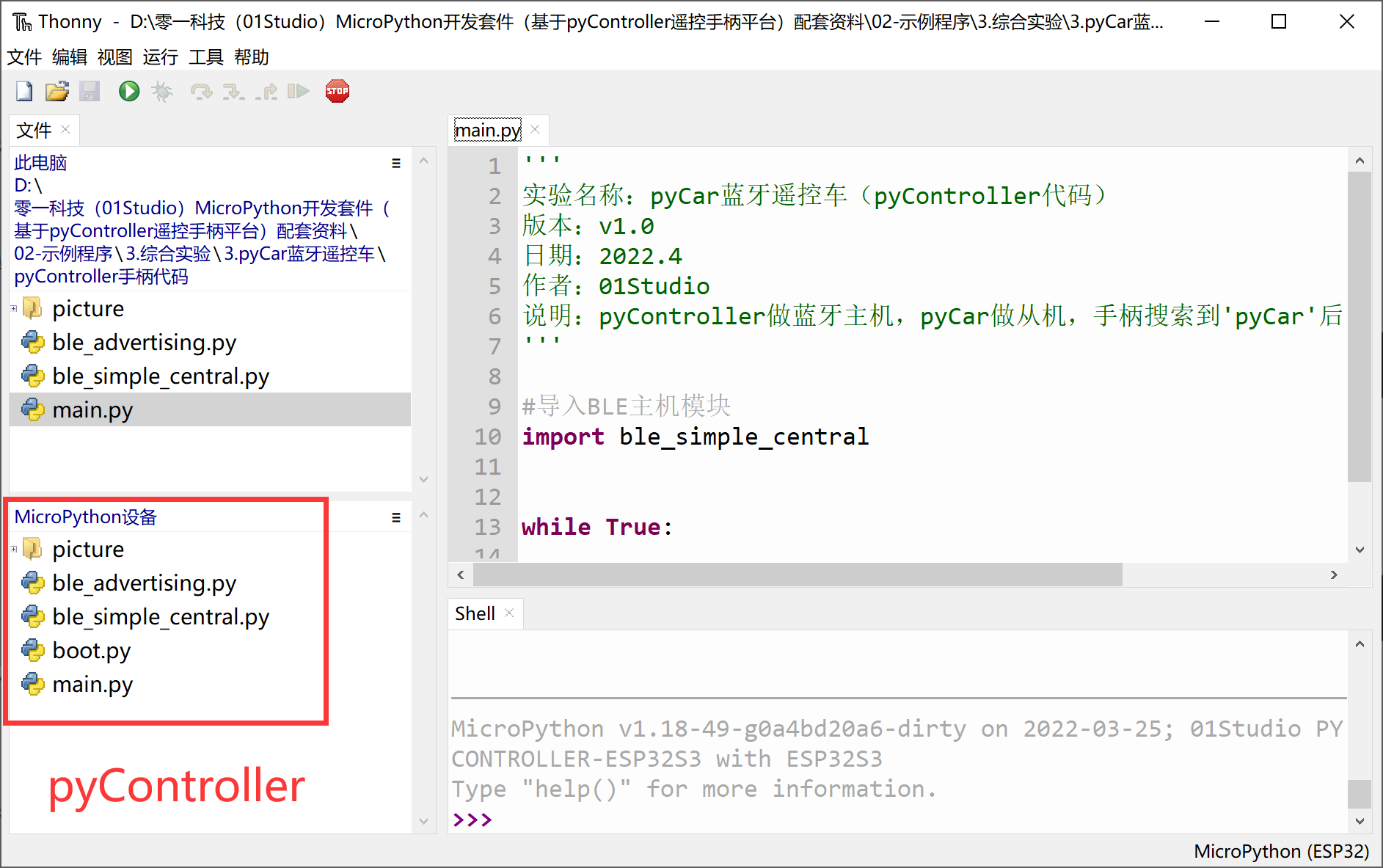
pyController遥控手柄(蓝牙主机)代码
main.py代码
'''
实验名称:pyCar蓝牙遥控车(pyController代码)
版本:v1.0
日期:2022.4
作者:01Studio
说明:pyController做蓝牙主机,pyCar做从机,手柄搜索到'pyCar'后发起连接,然后控制。
'''
#导入BLE主机模块
import ble_simple_central
while True:
#执行主机扫描连接代码
ble_simple_central.ble_connect()
ble_simple_central.py关键代码:
...
#扫描连接函数
def ble_connect():
ble = bluetooth.BLE()
central = BLESimpleCentral(ble)
not_found = False
def on_scan(addr_type, addr, name):
if addr_type is not None:
print("Found peripheral:", addr_type, addr, name)
central.connect()
else:
global not_found
not_found = True
print("No peripheral found.")
central.scan(callback=on_scan)
# Wait for connection...
while not central.is_connected():
time.sleep_ms(100)
if not_found:
break
print("Connected")
#接收信息处理
def on_rx(v):
print("RX", len(v))
for i in range(len(v)):
print(v[i])
central.on_notify(on_rx)
with_response = False
#构建手柄对象
gamepad = controller.CONTROLLER()
while central.is_connected():
try:
a = gamepad.read() #读取手柄数据
print("TX", a)
central.write(bytes(a), with_response) #发送手柄数据
except:
print("TX failed")
time.sleep_ms(400 if with_response else 30) #30ms发送一次
print("Disconnected")
...
实验结果
将示例程序文件夹所有库代码文件分别发送到pyController和pyCar。
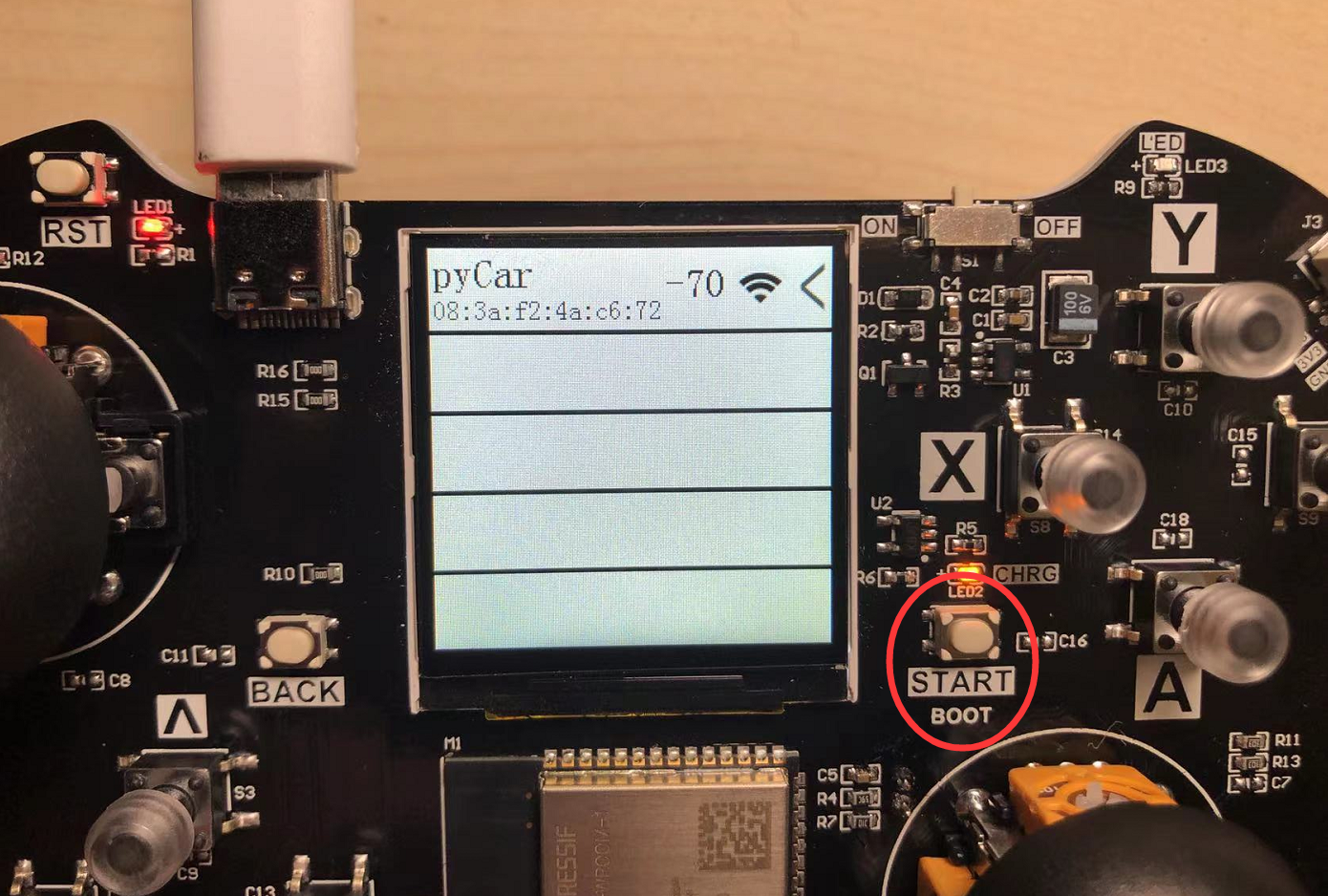
复位小车,等待启动。然后启动手柄,可以看到搜索到pyCar,信息包含mac地址和信号强度。(支持多台pyCar同时搜索)。

信号强的范围是 0 ~ -99, 值越接近0表示信号越好。

如果搜索到多台,可以通过按手柄的上、下键来选择,点击START键即可连接小车。
连接成功后出现小车界面,这时候即可遥控小车。当前控制功能是上下左右4个按键分别控制小车的4个运动方向,B键开车灯,A键关车灯。
如需更多的控制方式,修改pyCar的信息接收代码即可。

本节例程的扩展性非常强,只需要修改一下pyCar(蓝牙从机)代码即可控制小车各类功能,建议手柄传输给小车的是原始数据,将数据判断处理交给受控设备(小车),这样通用性会更强一点。