巡线小车
前言
相信大家都有在网上看到过可以跟着黑线行走的小车,也就是我们说的巡线小车,本节我们就实验pyCar编程实现巡线行驶。

实验目的
编程实现小车巡线(黑线)行驶。
实验讲解
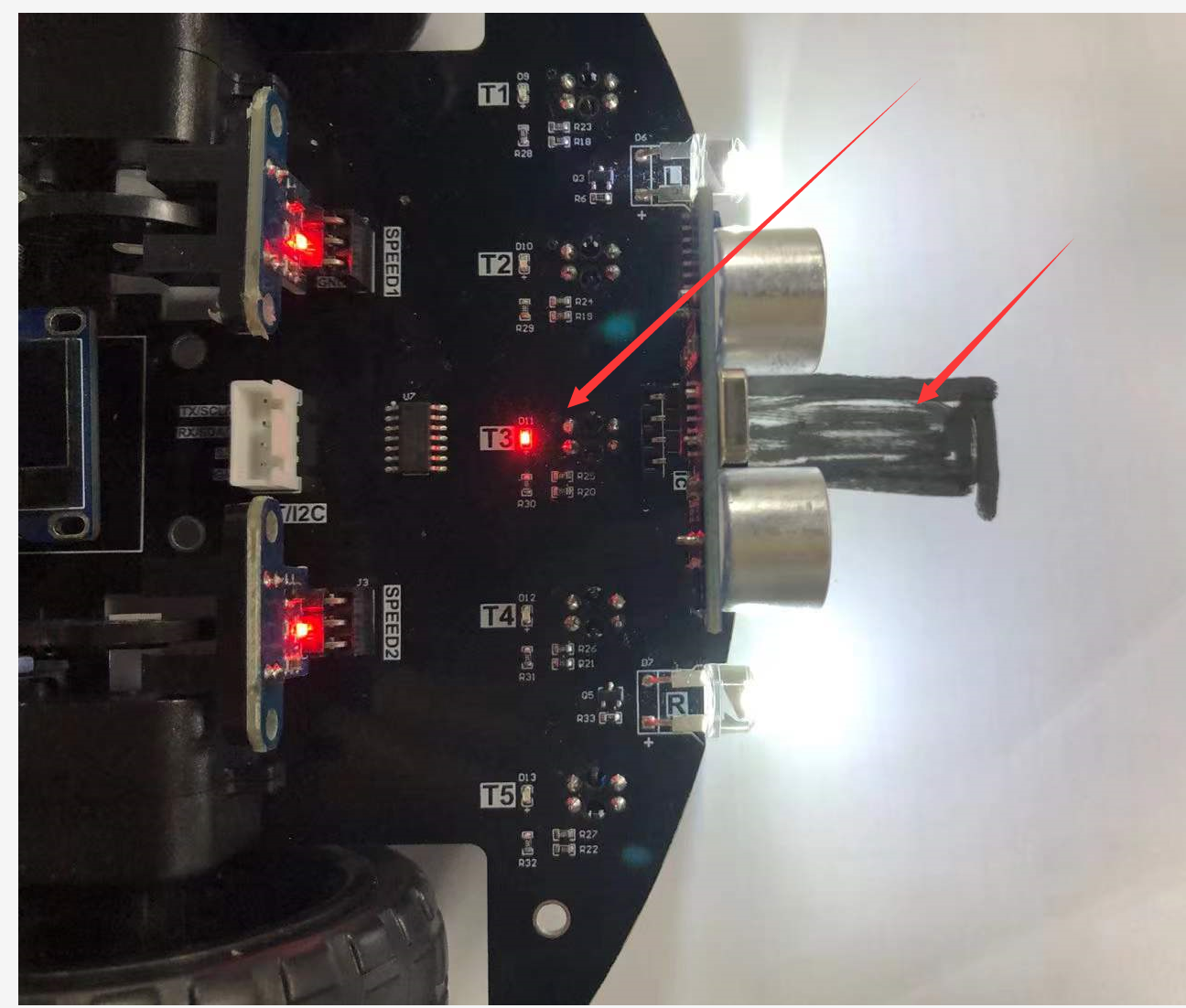
pyCar的车头有5路光电传感器,当车在白色路面行驶时(反光性比较好),全部指示灯熄灭,输出高电平。当遇到黑色赛道(无反光),对应的传感器指示灯亮,输出低电平。
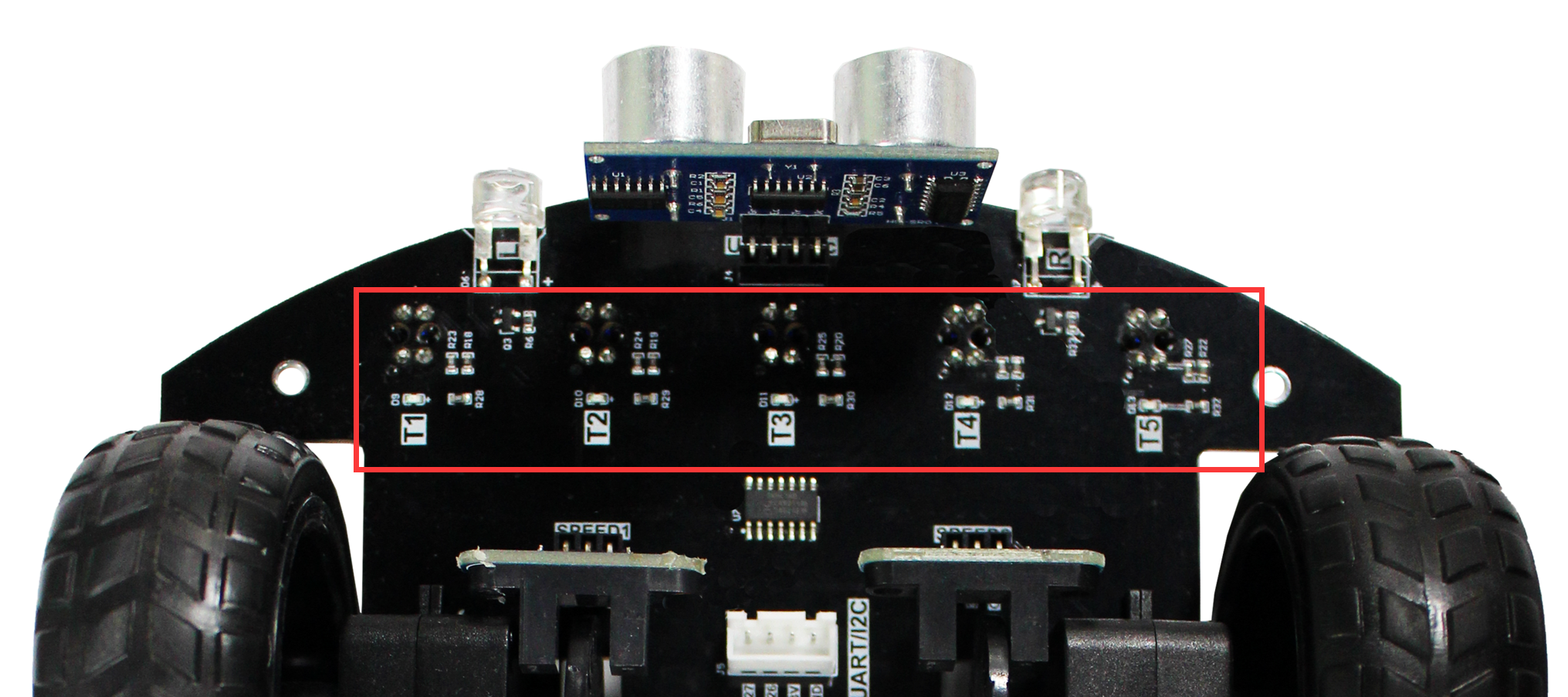
关于小车光电传感器检测实验前面章节已经有详细讲解,这里不再重复,具体参考:
控制方式是正常情况小车走直线,当小车偏左时候右转调整,当小车偏右时候左转调整,代码编写流程如下:
参考代码
'''
实验名称:pyCar巡线例程
版本:v1.0
作者:01Studio
说明:使用pyCar的光电传感器实现黑线巡线
'''
#导入相关模块
from car import CAR
import time
#初始化pyCar
Car = CAR()
time.sleep_ms(300) #等待稳定
'''
########巡线检测###########
T1-T2-T3-T4-T5 光电传感器
11011 直线
10111 偏右,往左调整
01111 严重偏右,往左调整
11101 偏左,往右调整
11110 严重偏左,往右调整
'''
while True:
#偏右,往左调整
if Car.T1()==0 or Car.T2()==0:
time.sleep_ms(10) #消抖
if Car.T1()==0 or Car.T2()==0 :
Car.turn_left()
while Car.T4()==1 and Car.T5()==1:
if Car.T3() == 0:
time.sleep_ms(10)
if Car.T3() == 0:
break
Car.forward()
#偏左,往右调整
elif Car.T4()==0 or Car.T5()==0 :
time.sleep_ms(10)
if Car.T4()==0 or Car.T5()==0 :
Car.turn_right()
while Car.T1()==1 and Car.T2()==1:
if Car.T3() == 0:
time.sleep_ms(10)
if Car.T3() == 0:
break
Car.forward()
#普通情况走直线
else:
Car.forward()
实验结果
本教程需要一条黑线的赛道,用户可以自行设计或者点击购买>>
将相关示例程序的所有代码文件和car.py库文件发送至pyCar文件系统,便可实现上电运行小车巡线功能。
小车巡线原理简单,有兴趣用户可以深入研究,实现更快的行驶速度。