飞行教程
- 组装&飞行视频教程
pyDrone默认出厂例程需使用pyController手柄控制,使用蓝牙(BLE)方式。
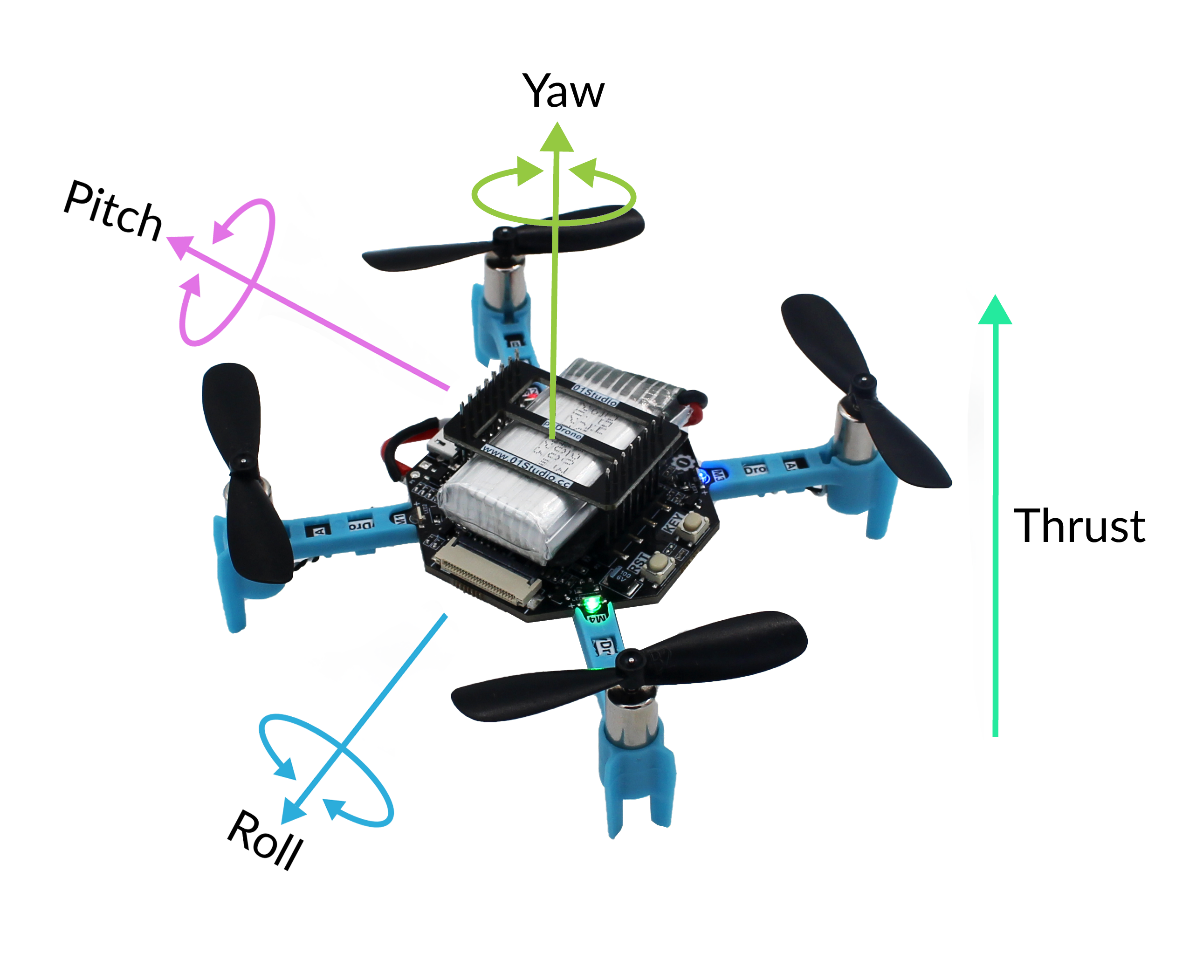
- pyDrone坐标系:
- pyController遥控手柄

校准
给四轴飞行器接上电池,水平放置(不水平会导致无法校准通过),然后按一下复位键。

等待校准,通常在10秒内可以完成校准。校准过程蓝灯闪亮,校准通过后蓝灯常亮。

连接手柄
启动手柄,通过左右按键选择,等“pyDrone”界面出来后按“START”键进入飞控控制模式。

可以看到搜索到pyDrone,信息包含蓝牙mac地址和信号强度。(支持多台pyDrone同时搜索)。
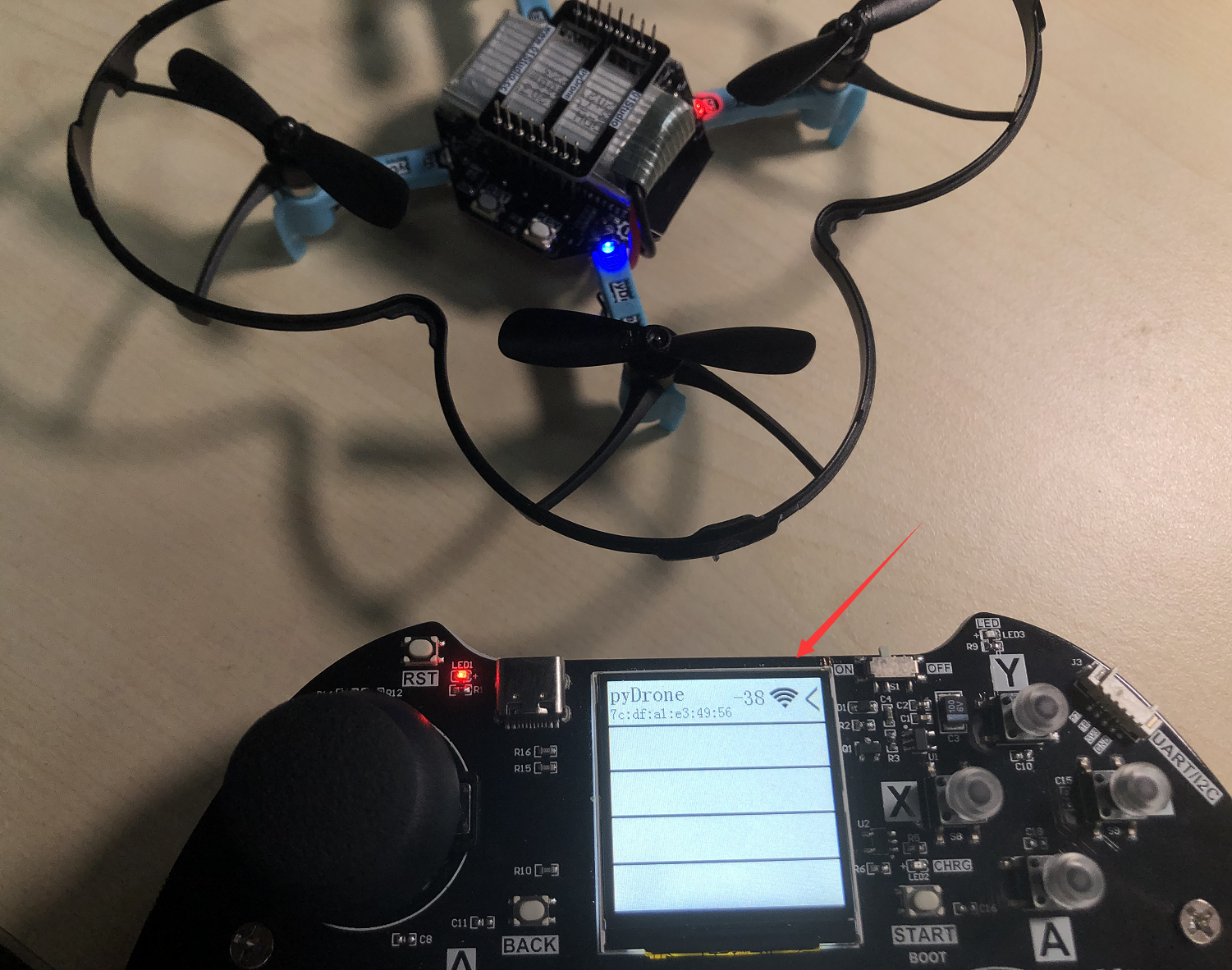
信号强的范围是 0 ~ -99, 值越接近0表示信号越好。

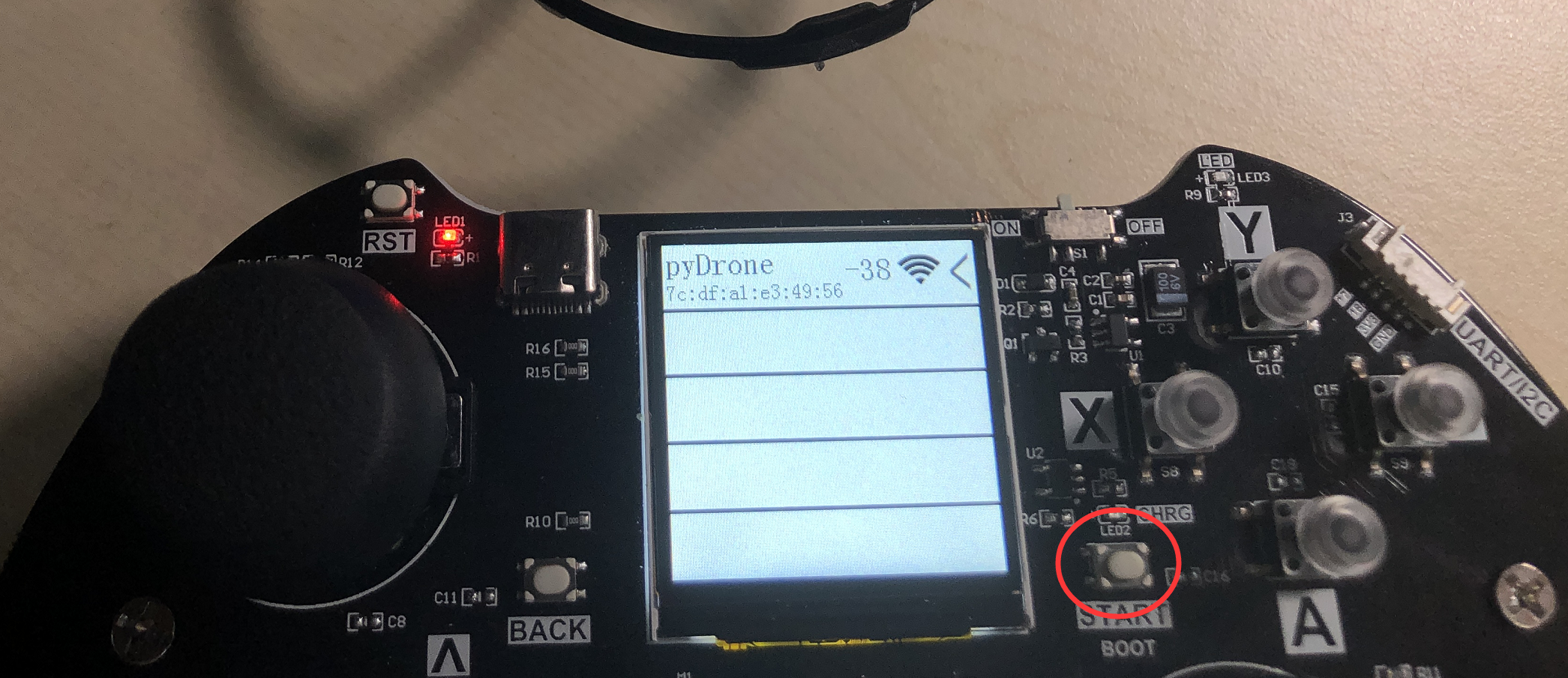
如果搜索到多台,可以通过按手柄的上、下键来选择对应设备,然后长按START键即可连接pyDrone。
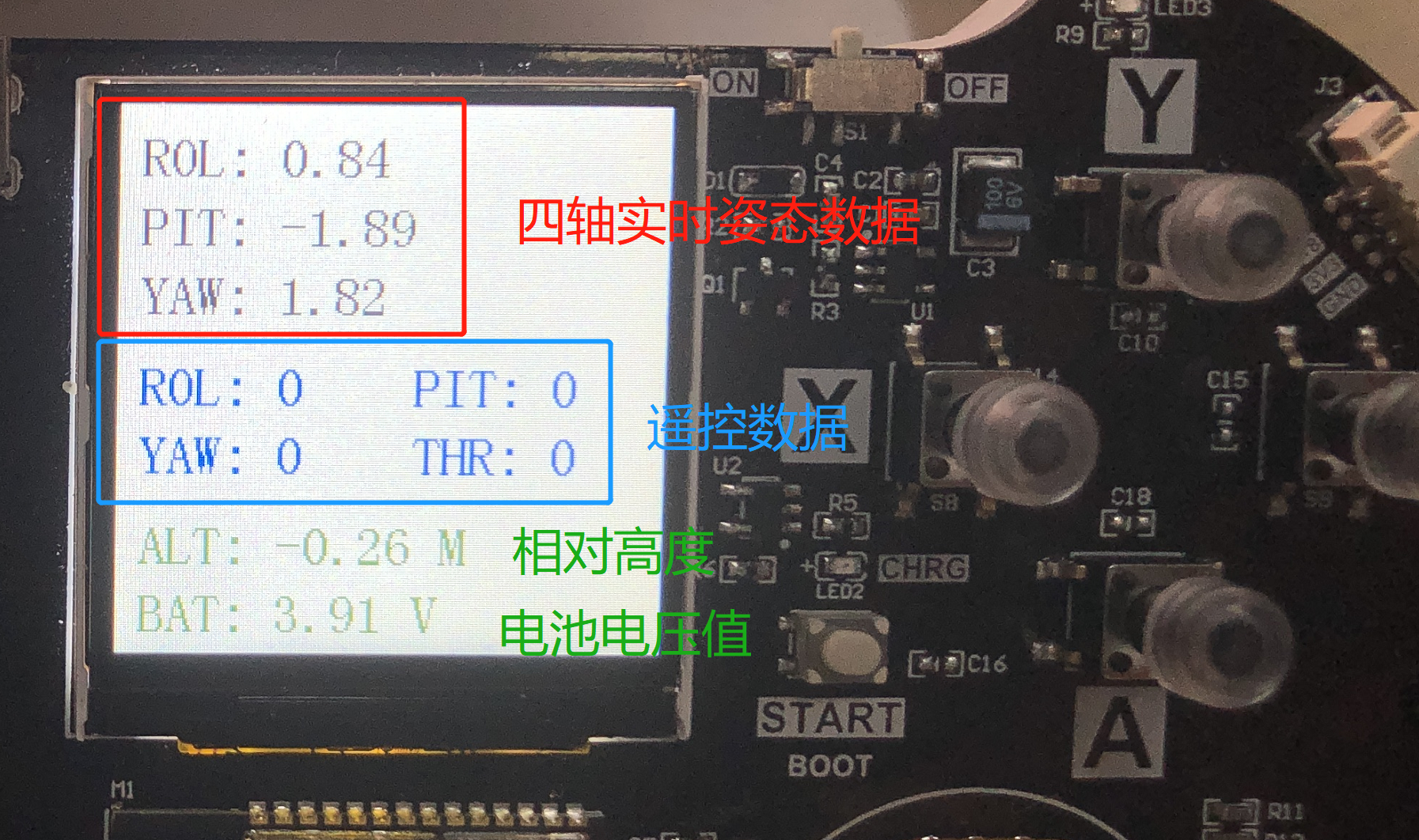
四轴飞行器的绿灯常亮表示成功连接。连接成功后手柄显示屏出现pyDrone发送的实时信息界面

从上到下分别是四轴姿态数据、遥控器数据、相对高度、电池电压值(飞行电压比静止电压低一点,当飞行时电压低于3.1V为低电量)。
飞行控制
摄像头接口方向为机头方向。出厂代码默认为无头飞行模式。
- 无头模式。表示以周围环境为参照系,飞行的前后左右方向跟机身无关,通常用于室内飞行;
- 有头模式。表示以四轴机身为参照系,飞行的前后左右方向跟机身有关。四轴自转后保持机头方向为正前方,通常用于室外穿越机飞行。

这时候可使用遥控pyDrone四轴飞行器。手柄控制说明如下:
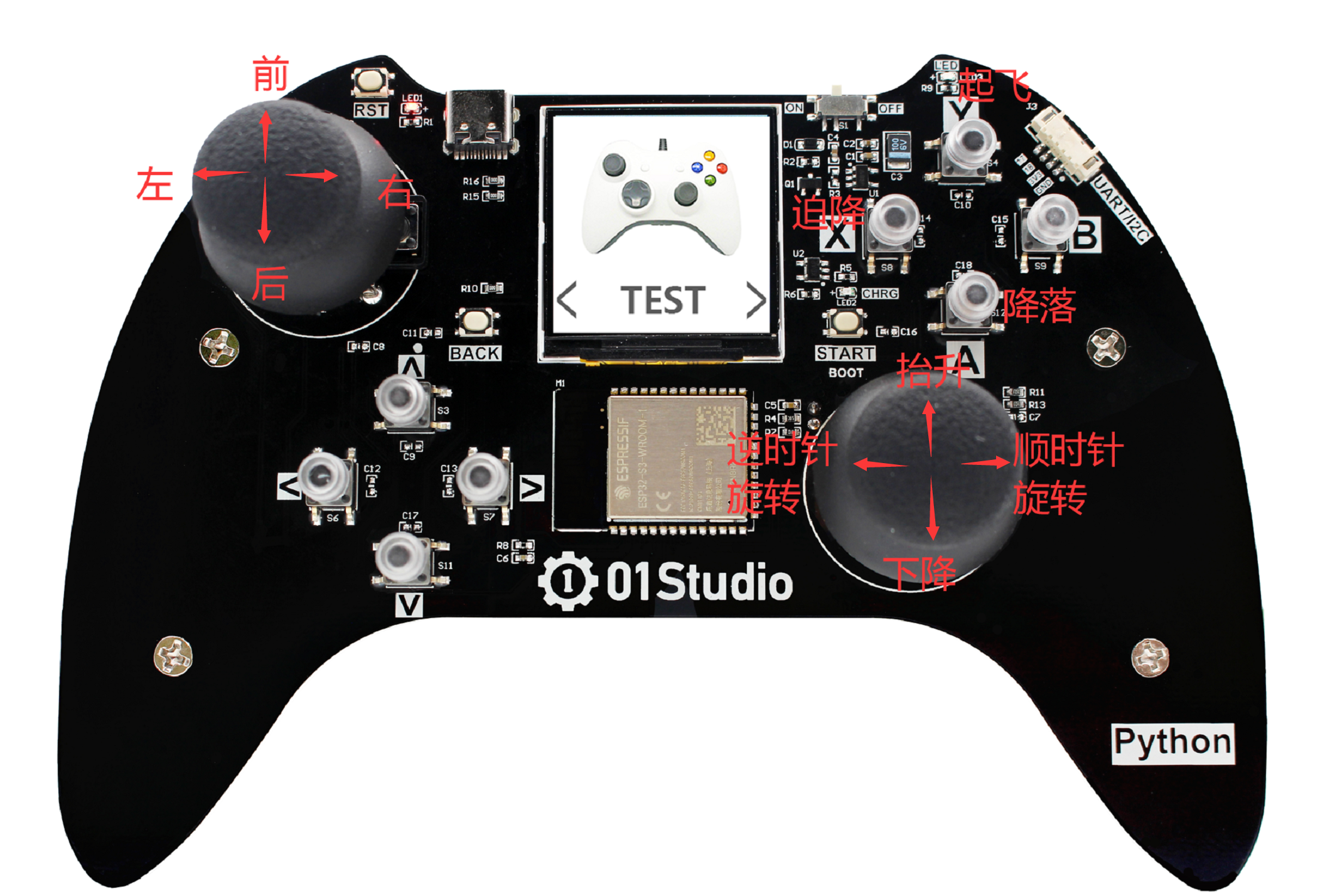
先按“Y”键起飞,待抬升到一定高度后即可通过手柄进行各种飞行动作控制。
需要降落时候按“A”键,四轴缓缓下降,降落过程依然可以控制方向。
遇到突发情况时候可以按下“X”键,电机会立即停止转动。
当四轴飞行器与地面夹角大于60°会判断为失控,电机立即停转。