麦克纳姆轮小车
前言
pyCar可以支持直径小于70mm的麦克纳母轮子(TT接口),从而实现全向麦克纳姆轮小车,直接更换轮子即可。点击购买>>
实验目的
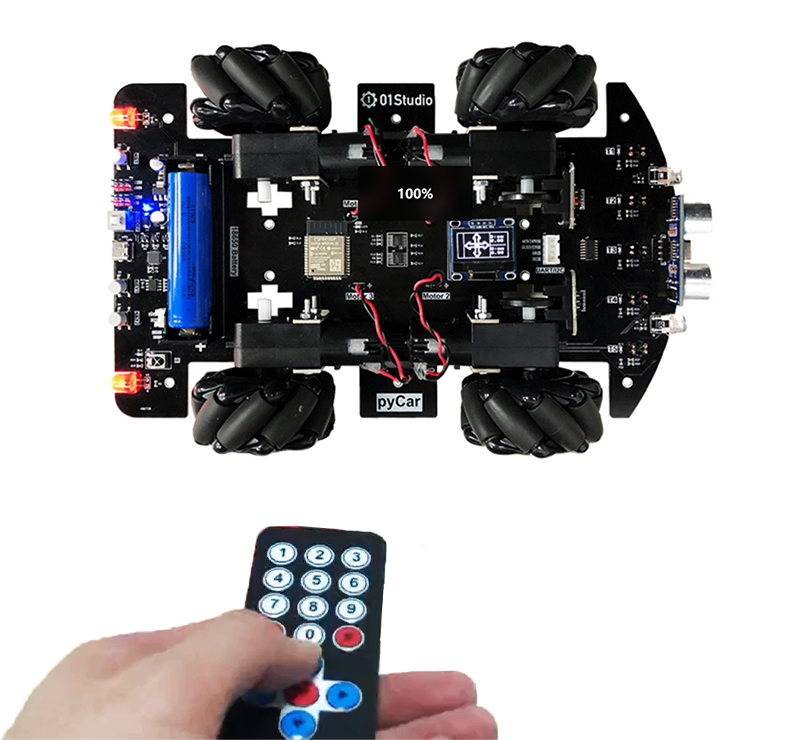
使用红外遥控器控制麦克纳姆轮pyCar小车。
实验讲解
使用麦克纳姆轮可以让小车实现全向移动,也就是除了前进后退,还有左右以及斜45°平移。参考下图:
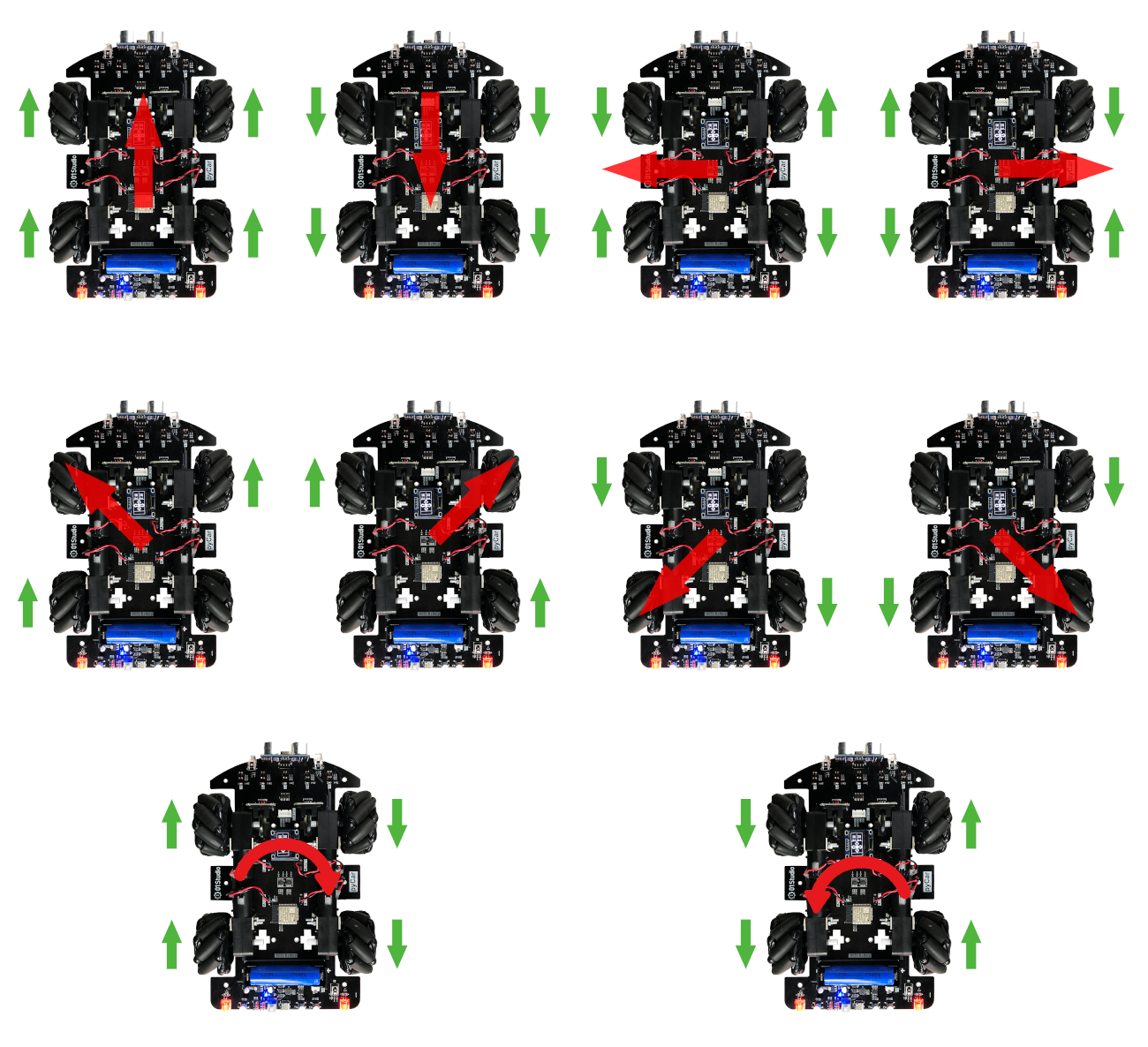
关于麦克纳姆轮详细工作原理可以参考文章:麦克纳姆轮的工作原理是什么?
关于小车红外遥控实验前面章节已经有详细讲解,这里不再重复,具体参考:
01Studio pyCar的car.py库文件已经将麦克纳姆轮控制接口封装好。使用方法如下:
CAR对象
构造函数
Car = car.CAR()
构造pyCar对象。
使用方法
Car.up()
前移。
Car.down()
后移。
Car.left()
左移。
Car.right()
右移。
Car.up_left()
左前移。
Car.up_right()
右前移。
Car.down_left()
左后移。
Car.down_right()
右后移。
Car.clockwise()
顺时针旋转。
Car.Counterclockwise()
逆时针旋转。
Car.stop()
停止。
更多用法请阅读官方文档:https://pycar.01studio.cc/zh-cn/latest/manual/quickref.html
代码编写流程如下:
参考代码
'''
实验名称:使用红外遥控器控制pyCar(麦克纳姆轮)
版本:v1.0
作者:CaptainJackey
'''
#导入相关模块
from car import CAR
import time
#初始化pyCar
Car = CAR()
time.sleep_ms(300) #等待稳定
#车灯状态
light_state = 0
while True:
key = Car.getIR() #读取红外传感器
if key != None: #有按键按下
#按键2,前移
if key == 0x46:
Car.up()
time.sleep(1)
Car.stop()
#按键8,后移
if key == 0x15:
Car.down()
time.sleep(1)
Car.stop()
#按键4,左移
if key == 0x44:
Car.left()
time.sleep(1)
Car.stop()
#按键6,右移
if key == 0x43:
Car.right()
time.sleep(1)
Car.stop()
#按键1,左前移
if key == 0x45:
Car.up_left()
time.sleep(1)
Car.stop()
#按键3,右前移
if key == 0x47:
Car.up_right()
time.sleep(1)
Car.stop()
#按键7,左后移
if key == 0x07:
Car.down_left()
time.sleep(1)
Car.stop()
#按键9,右后移
if key == 0x09:
Car.down_right()
time.sleep(1)
Car.stop()
#按键*,逆时针旋转
if key == 0x16:
Car.Counterclockwise()
time.sleep(1)
Car.stop()
#按键#,顺时针旋转
if key == 0x0d:
Car.clockwise()
time.sleep(1)
Car.stop()
#按键OK,车灯开关
if key == 28:
light_state = not light_state
Car.light(light_state)
实验结果
将相关示例程序的所有代码文件和car.py库文件发送至pyCar文件系统,通过遥控器便可控制麦克纳姆轮小车各种动作。
有兴趣用户可以根据前面蓝牙遥控车章节修改代码,改成使用pyController遥控器蓝牙控制。