超声波避障小车
前言
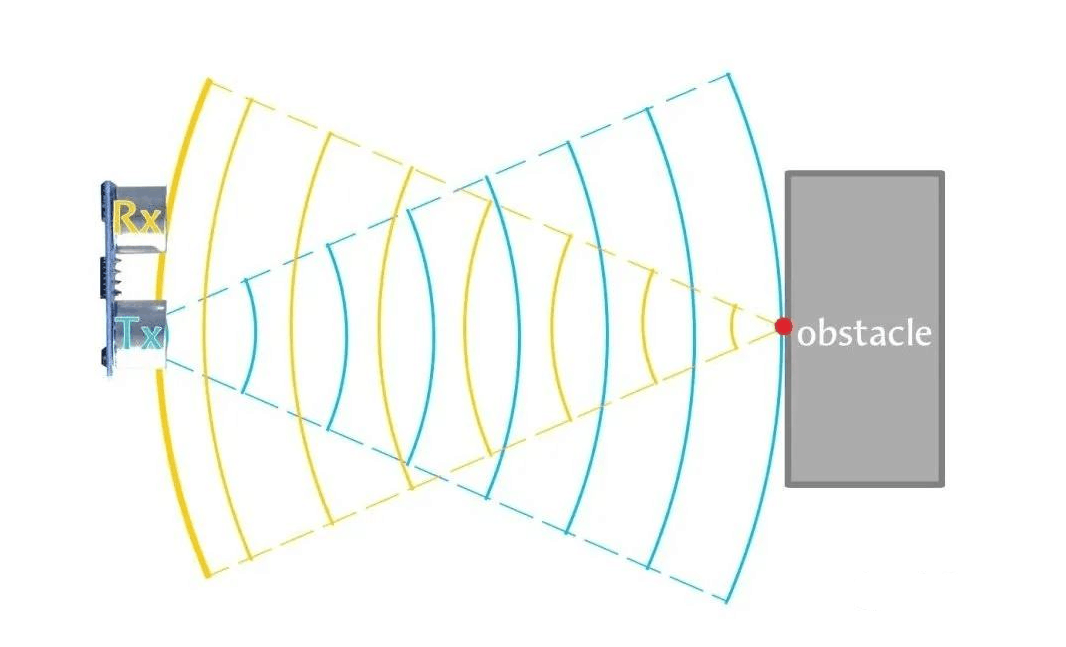
想知道你的扫地机器人是怎么避开障碍物么?当它遇到墙、桌子会自动转向,pyCar车头配备了超声波传感器,也可以实现这个功能。
实验目的
编程实现小车行驶避障。
实验讲解
关于小车移动和超声波实验前面章节已经有详细讲解,这里不再重复,具体参考:
这里我们使用一个最简单的控制方式,那就是当小车实时检测超声波距离值,当距离少于某个设定值时,小车随机左右转向,大于此设定值则正常直线行走。
有了前面学习的积累,可以通过编程轻松实现相关功能。代码编写流程如下:
参考代码
'''
实验名称:超声波避障小车
版本:v1.0
作者:01Studio
平台:pyCar
'''
#导入相关模块
from car import CAR
import time,random
#初始化pyCar
Car = CAR()
time.sleep_ms(300) #等待稳定
turn_node = 1
while True:
#距离少于50cm就转弯
if 0 < int(Car.getDistance()) < 50 :
#从0和1中随机生成一个数决定左右转向
if turn_node == 1:
turn_direct = random.randint(0,1)
turn_node = 0
#1右转,0左转。
if turn_direct:
Car.turn_right(mode=1)
else:
Car.turn_left(mode=1)
else: #走直线
Car.forward()
turn_node = 1
time.sleep_ms(50) #适当延时调整响应速度
上面代码加入了一个随机转向设置,实现小车遇到障碍物时候随机左转或右转。
实验结果
将相关示例程序的所有代码文件和car.py库文件发送至pyCar文件系统,便可实现上电运行小车避障功能。
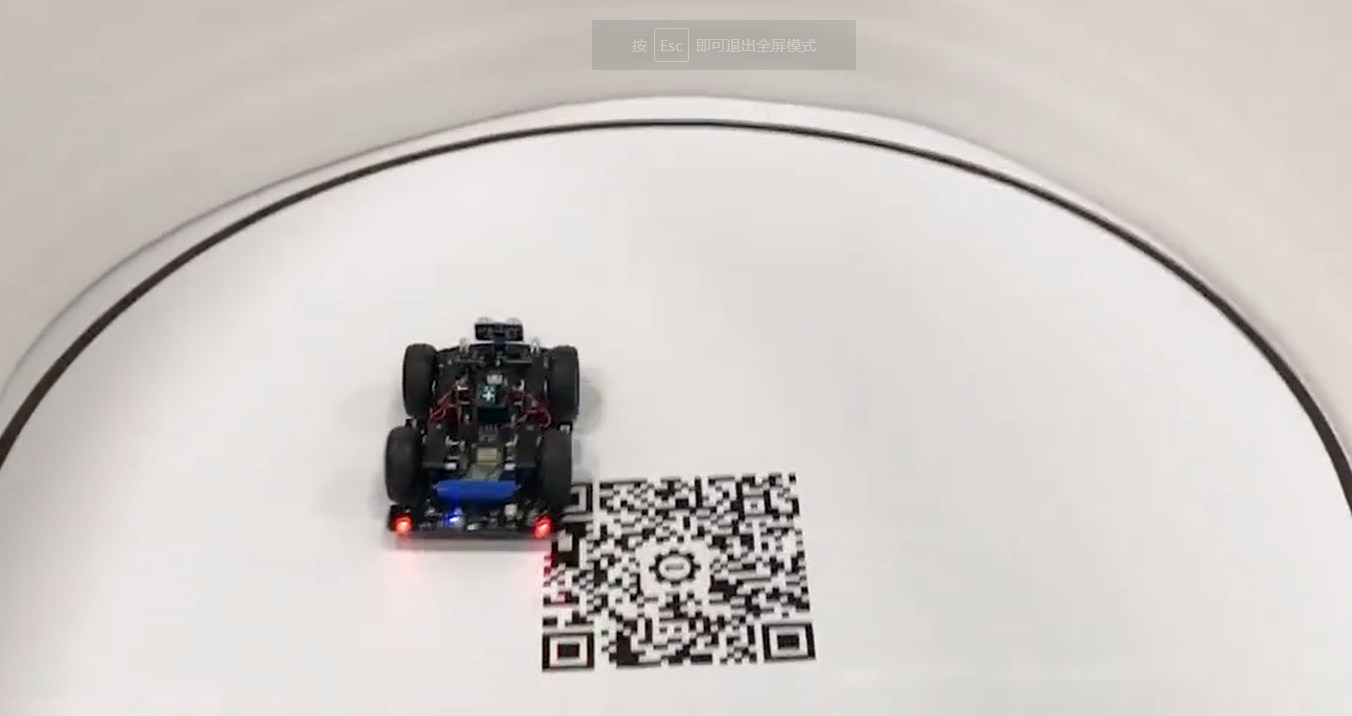
小车避障的原理非常简单,有兴趣的用户可以调整代码中的参数,打造一台适合自己的避障小车。