PnP测距(基于矩形角点)
实验讲解
PnP 测距是基于透视 n 点(Perspective-N-Point,简称 PNP)算法的非接触式距离测量方法,核心是通过相机图像与已知参考点求解目标距离。
典型应用
- 机器人定位与避障:机器人通过相机识别环境参考点,计算与障碍物距离。
- AR/VR 导航:叠加虚拟信息时,通过 PNP 测距确定现实目标的空间位置。
- 工业视觉测量:无需接触工件,快速测量零件与相机的距离或零件间相对位置。
本节例程基于矩形角点,简单来说就是已知矩形的长宽尺寸,然后摄像头识别矩形角点,再计算摄像头到矩形的距离。
rgb888_pnp_distance_from_corners对象
构造函数
res = cv_lite.rgb888_pnp_distance_from_corners(
image_shape, img_np,
camera_matrix, dist_coeffs, dist_len,
obj_width_real, obj_height_real
)
查找图像中指定的彩色色块。参数说明:
image_shape: 图像形状,list类型,顺序为[高,宽],如[480,640];img_np: 图像数据引用,ulab.numpy.ndarray类型;camera_matrix: 相机内参矩阵dist_coeffs: 畸变系数dist_len: 畸变系数长度roi_width_real: 实际ROI宽度,单位cmroi_height_real: 实际ROI高度,单位cm
使用方法
以上函数返回res值:res[0]估算距离,单位cm,res[1]最小外接矩形xywh,res[2]矩形角点坐标
更多用法请阅读官方文档
代码编写流程如下:
参考代码
CanMV K230 + 3.5寸mipi屏
'''
实验名称:PnP测距(基于矩形角点)
实验平台:01Studio CanMV K230
教程:wiki.01studio.cc
说明:通过修改lcd_width和lcd_height参数值选择3.5寸或2.4寸屏。
'''
# ============================================================
# MicroPython 轮廓检测+PnP 距离估计测试(cv_lite 扩展)
# Contour Detection + PnP Distance Estimation via cv_lite
# ============================================================
import time, os, gc
from machine import Pin
from media.sensor import *
from media.display import *
from media.media import *
import _thread
import cv_lite # 需要实现对应的 native C 接口
import ulab.numpy as np
#CanMV K230 - 3.5寸mipi屏分辨率定义
lcd_width = 800
lcd_height = 480
'''
#CanMV K230 mini - 2.4寸mipi屏分辨率定义
lcd_width = 640
lcd_height = 480
'''
# -------------------------------
# 图像尺寸 / Image size
# -------------------------------
image_shape = [480, 640]
# -------------------------------
# 摄像头初始化
# -------------------------------
sensor = Sensor(id=2, width=1280, height=960, fps=90)
sensor.reset()
sensor_width = sensor.width(None)
sensor_height = sensor.height(None)
# 设置采集图片的分辨率
sensor.set_framesize(w=image_shape[1], h=image_shape[0],chn=CAM_CHN_ID_0)
sensor.set_pixformat(Sensor.RGB888)
# -------------------------------
# 虚拟显示器输出
# -------------------------------
Display.init(Display.ST7701, width=lcd_width, height=lcd_height, to_ide=True, quality=50)
# -------------------------------
# 启动媒体管理器
# -------------------------------
MediaManager.init()
sensor.run()
# ----------------------------------------
# 相机参数 / 01Studio K230默认相机参数,不同镜头有所差异
# ----------------------------------------
camera_matrix = [
789.1207591978101,0.0,308.8211709453399,
0.0,784.6402477892891,220.80604393744628,
0.0,0.0,1.0
]
dist_coeffs = [-0.0032975761115662697,-0.009984467065645562,-0.01301691382446514,-0.00805834837844004,-1.063818733754765]
dist_len = len(dist_coeffs)
# -------------------------------
# 目标实际尺寸(单位 cm)
# -------------------------------
obj_width_real = 12
obj_height_real = 6
# -------------------------------
# 帧率监控
# -------------------------------
clock = time.clock()
# -------------------------------
# 主循环
# -------------------------------
while True:
clock.tick()
img = sensor.snapshot()
img_np = img.to_numpy_ref()
# 距离估计(通过轮廓+PnP)
res = cv_lite.rgb888_pnp_distance_from_corners(
image_shape, img_np,
camera_matrix, dist_coeffs, dist_len,
obj_width_real, obj_height_real
)
distance=res[0]
rect=res[1]
corners=res[2]
# 如果距离估计成功
if distance > 0:
img.draw_string_advanced(0, 40, 32, "Dist: %.2fcm" % distance, color=(0, 255, 0))
img.draw_rectangle(rect[0], rect[1], rect[2], rect[3], color=(255, 0, 0), thickness=2)
img.draw_cross(corners[0][0],corners[0][1],color=(255,255,255),size=5,thickness=2)
img.draw_cross(corners[1][0],corners[1][1],color=(255,255,255),size=5,thickness=2)
img.draw_cross(corners[2][0],corners[2][1],color=(255,255,255),size=5,thickness=2)
img.draw_cross(corners[3][0],corners[3][1],color=(255,255,255),size=5,thickness=2)
else:
img.draw_string_advanced(0, 40, 32, "No Rect Found", color=(255, 0, 0))
img.draw_string_advanced(0, 0, 30, 'FPS: '+str("%.3f"%(clock.fps())), color = (255, 255, 255))
# 显示结果图像 / Show image with blobs
Display.show_image(img, x=round((lcd_width-sensor.width())/2),y=round((lcd_height-sensor.height())/2))
print("contour_pnp:", clock.fps())
# print("Distance:", distance)
gc.collect()
# -------------------------------
# 释放资源
# -------------------------------
sensor.stop()
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
MediaManager.deinit()
CanMV K230 mini + 2.4寸mipi屏
'''
实验名称:PnP测距(基于矩形角点)
实验平台:01Studio CanMV K230
教程:wiki.01studio.cc
说明:通过修改lcd_width和lcd_height参数值选择3.5寸或2.4寸屏。
'''
# ============================================================
# MicroPython 轮廓检测+PnP 距离估计测试(cv_lite 扩展)
# Contour Detection + PnP Distance Estimation via cv_lite
# ============================================================
import time, os, gc
from machine import Pin
from media.sensor import *
from media.display import *
from media.media import *
import _thread
import cv_lite # 需要实现对应的 native C 接口
import ulab.numpy as np
'''
#CanMV K230 - 3.5寸mipi屏分辨率定义
lcd_width = 800
lcd_height = 480
'''
#CanMV K230 mini - 2.4寸mipi屏分辨率定义
lcd_width = 640
lcd_height = 480
# -------------------------------
# 图像尺寸 / Image size
# -------------------------------
image_shape = [480, 640]
# -------------------------------
# 摄像头初始化
# -------------------------------
sensor = Sensor(id=2, width=1280, height=960, fps=90)
sensor.reset()
sensor_width = sensor.width(None)
sensor_height = sensor.height(None)
# 设置采集图片的分辨率
sensor.set_framesize(w=image_shape[1], h=image_shape[0],chn=CAM_CHN_ID_0)
sensor.set_pixformat(Sensor.RGB888)
# -------------------------------
# 虚拟显示器输出
# -------------------------------
Display.init(Display.ST7701, width=lcd_width, height=lcd_height, to_ide=True, quality=50)
# -------------------------------
# 启动媒体管理器
# -------------------------------
MediaManager.init()
sensor.run()
# ----------------------------------------
# 相机参数 / 01Studio K230默认相机参数,不同镜头有所差异
# ----------------------------------------
camera_matrix = [
789.1207591978101,0.0,308.8211709453399,
0.0,784.6402477892891,220.80604393744628,
0.0,0.0,1.0
]
dist_coeffs = [-0.0032975761115662697,-0.009984467065645562,-0.01301691382446514,-0.00805834837844004,-1.063818733754765]
dist_len = len(dist_coeffs)
# -------------------------------
# 目标实际尺寸(单位 cm)
# -------------------------------
obj_width_real = 12
obj_height_real = 6
# -------------------------------
# 帧率监控
# -------------------------------
clock = time.clock()
# -------------------------------
# 主循环
# -------------------------------
while True:
clock.tick()
img = sensor.snapshot()
img_np = img.to_numpy_ref()
# 距离估计(通过轮廓+PnP)
res = cv_lite.rgb888_pnp_distance_from_corners(
image_shape, img_np,
camera_matrix, dist_coeffs, dist_len,
obj_width_real, obj_height_real
)
distance=res[0]
rect=res[1]
corners=res[2]
# 如果距离估计成功
if distance > 0:
img.draw_string_advanced(0, 40, 32, "Dist: %.2fcm" % distance, color=(0, 255, 0))
img.draw_rectangle(rect[0], rect[1], rect[2], rect[3], color=(255, 0, 0), thickness=2)
img.draw_cross(corners[0][0],corners[0][1],color=(255,255,255),size=5,thickness=2)
img.draw_cross(corners[1][0],corners[1][1],color=(255,255,255),size=5,thickness=2)
img.draw_cross(corners[2][0],corners[2][1],color=(255,255,255),size=5,thickness=2)
img.draw_cross(corners[3][0],corners[3][1],color=(255,255,255),size=5,thickness=2)
else:
img.draw_string_advanced(0, 40, 32, "No Rect Found", color=(255, 0, 0))
img.draw_string_advanced(0, 0, 30, 'FPS: '+str("%.3f"%(clock.fps())), color = (255, 255, 255))
# 显示结果图像 / Show image with blobs
Display.show_image(img, x=round((lcd_width-sensor.width())/2),y=round((lcd_height-sensor.height())/2))
print("contour_pnp:", clock.fps())
# print("Distance:", distance)
gc.collect()
# -------------------------------
# 释放资源
# -------------------------------
sensor.stop()
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
MediaManager.deinit()
实验结果
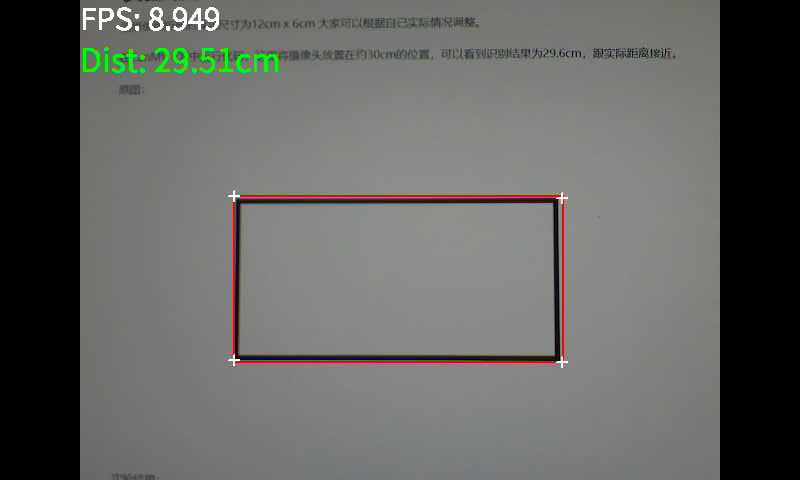
这里使用矩形的真实尺寸为12cm x 6cm 大家可以根据自己实际情况调整。
在CanMV IDE中运行代码,这里将摄像头放置在约30cm的位置,可以看到识别结果为29.5cm,跟实际距离接近。
原图:

实验结果: