圆形检测(彩色图)
实验讲解
圆形检测(彩色)用于识别图像里的圆并画框标注。使用cv_lite库与前面 圆形检测 例程对比速度更快。

rgb888_find_circles对象
构造函数
circles = cv_lite.rgb888_find_circles(image_shape, img_np, dp, minDist, param1, param2, minRadius, maxRadius)
查找图像中的圆形。参数说明:
image_shape: 图像形状,list类型,顺序为[高,宽],如[480,640]img_np: 图像数据引用,ulab.numpy.ndarray类型dp: 累加器分辨率与图像分辨率的反比,float类型minDist: 检测到的圆心最小距离,int类型param1: Canny边缘检测高阈值,int类型param2: 霍夫变换圆心检测阈值,int类型minRadius: 检测圆最小半径,int类型maxRadius: 检测圆最大半径,int类型
使用方法
以上函数返回circles值:圆信息列表,每3个元素为一个圆的信息,包括位置x、y、r
更多用法请阅读 官方文档
代码编写流程如下:
参考代码
CanMV K230 + 3.5寸mipi屏
'''
实验名称:圆形检测
实验平台:01Studio CanMV K230
教程:wiki.01studio.cc
说明:通过修改lcd_width和lcd_height参数值选择3.5寸或2.4寸屏。
'''
# ============================================================
# MicroPython 基于 cv_lite 的 RGB888 霍夫圆检测测试代码
# RGB888 Hough Circle Detection Test using cv_lite extension
# ============================================================
import time, os, sys, gc
from machine import Pin
from media.sensor import * # 导入摄像头接口 / Camera interface
from media.display import * # 导入显示接口 / Display interface
from media.media import * # 导入媒体资源管理器 / Media manager
import _thread
import cv_lite # 导入 cv_lite 扩展模块 / cv_lite extension
import ulab.numpy as np # MicroPython 类 NumPy 库
#CanMV K230 - 3.5寸mipi屏分辨率定义
lcd_width = 800
lcd_height = 480
'''
#CanMV K230 mini - 2.4寸mipi屏分辨率定义
lcd_width = 640
lcd_height = 480
'''
# -------------------------------
# 图像尺寸设置 / Image resolution
# -------------------------------
image_shape = [480, 640] # 高 x 宽 / Height x Width
# -------------------------------
# 初始化摄像头(RGB888格式) / Initialize camera (RGB888 format)
# -------------------------------
sensor = Sensor(id=2, width=1280, height=960,fps=90)
sensor.reset()
sensor.set_framesize(width=image_shape[1], height=image_shape[0])
sensor.set_pixformat(Sensor.RGB888) # 设置 RGB888 像素格式 / Set RGB888 pixel format
# -------------------------------
# 初始化显示器(IDE虚拟显示) / Initialize display (IDE virtual output)
# -------------------------------
Display.init(Display.ST7701, width=lcd_width, height=lcd_height, to_ide=True, quality=100)
# -------------------------------
# 初始化媒体资源管理器 / Initialize media manager
# -------------------------------
MediaManager.init()
sensor.run()
# -------------------------------
# 启动帧率计时器 / Start FPS timer
# -------------------------------
clock = time.clock()
# -------------------------------
# 霍夫圆检测参数 / Hough Circle parameters
# -------------------------------
dp = 1 # 累加器分辨率与图像分辨率的反比 / Inverse ratio of accumulator resolution
minDist = 30 # 检测到的圆心最小距离 / Minimum distance between detected centers
param1 = 80 # Canny边缘检测高阈值 / Higher threshold for Canny edge detection
param2 = 20 # 霍夫变换圆心检测阈值 / Threshold for center detection in accumulator
minRadius = 10 # 检测圆最小半径 / Minimum circle radius
maxRadius = 50 # 检测圆最大半径 / Maximum circle radius
# -------------------------------
# 主循环 / Main loop
# -------------------------------
while True:
clock.tick()
# 拍摄一帧图像 / Capture a frame
img = sensor.snapshot()
img_np = img.to_numpy_ref() # 获取 RGB888 ndarray 引用
# 调用 cv_lite 扩展的霍夫圆检测函数,返回圆参数列表 [x, y, r, ...]
circles = cv_lite.rgb888_find_circles(
image_shape, img_np, dp, minDist, param1, param2, minRadius, maxRadius
)
# 遍历检测到的圆形,绘制圆形框
for i in range(0, len(circles), 3):
x = circles[i]
y = circles[i + 1]
r = circles[i + 2]
img.draw_circle(x, y, r, color=(255, 0, 0), thickness=2) # 红色圆圈
img.draw_string_advanced(0, 0, 30, 'FPS: '+str("%.3f"%(clock.fps())), color = (255, 255, 255))
# 显示结果图像 / Show image with blobs
Display.show_image(img, x=round((lcd_width-sensor.width())/2),y=round((lcd_height-sensor.height())/2))
# 垃圾回收 / Garbage collect
gc.collect()
# 打印帧率 / Print FPS
print("findcircles:", clock.fps())
# -------------------------------
# 程序退出时释放资源 / Cleanup on exit
# -------------------------------
sensor.stop()
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
MediaManager.deinit()
CanMV K230 mini + 2.4寸mipi屏
'''
实验名称:圆形检测
实验平台:01Studio CanMV K230
教程:wiki.01studio.cc
说明:通过修改lcd_width和lcd_height参数值选择3.5寸或2.4寸屏。
'''
# ============================================================
# MicroPython 基于 cv_lite 的 RGB888 霍夫圆检测测试代码
# RGB888 Hough Circle Detection Test using cv_lite extension
# ============================================================
import time, os, sys, gc
from machine import Pin
from media.sensor import * # 导入摄像头接口 / Camera interface
from media.display import * # 导入显示接口 / Display interface
from media.media import * # 导入媒体资源管理器 / Media manager
import _thread
import cv_lite # 导入 cv_lite 扩展模块 / cv_lite extension
import ulab.numpy as np # MicroPython 类 NumPy 库
'''
#CanMV K230 - 3.5寸mipi屏分辨率定义
lcd_width = 800
lcd_height = 480
'''
#CanMV K230 mini - 2.4寸mipi屏分辨率定义
lcd_width = 640
lcd_height = 480
# -------------------------------
# 图像尺寸设置 / Image resolution
# -------------------------------
image_shape = [480, 640] # 高 x 宽 / Height x Width
# -------------------------------
# 初始化摄像头(RGB888格式) / Initialize camera (RGB888 format)
# -------------------------------
sensor = Sensor(id=2, width=1280, height=960,fps=90)
sensor.reset()
sensor.set_framesize(width=image_shape[1], height=image_shape[0])
sensor.set_pixformat(Sensor.RGB888) # 设置 RGB888 像素格式 / Set RGB888 pixel format
# -------------------------------
# 初始化显示器(IDE虚拟显示) / Initialize display (IDE virtual output)
# -------------------------------
Display.init(Display.ST7701, width=lcd_width, height=lcd_height, to_ide=True, quality=100)
# -------------------------------
# 初始化媒体资源管理器 / Initialize media manager
# -------------------------------
MediaManager.init()
sensor.run()
# -------------------------------
# 启动帧率计时器 / Start FPS timer
# -------------------------------
clock = time.clock()
# -------------------------------
# 霍夫圆检测参数 / Hough Circle parameters
# -------------------------------
dp = 1 # 累加器分辨率与图像分辨率的反比 / Inverse ratio of accumulator resolution
minDist = 30 # 检测到的圆心最小距离 / Minimum distance between detected centers
param1 = 80 # Canny边缘检测高阈值 / Higher threshold for Canny edge detection
param2 = 20 # 霍夫变换圆心检测阈值 / Threshold for center detection in accumulator
minRadius = 10 # 检测圆最小半径 / Minimum circle radius
maxRadius = 50 # 检测圆最大半径 / Maximum circle radius
# -------------------------------
# 主循环 / Main loop
# -------------------------------
while True:
clock.tick()
# 拍摄一帧图像 / Capture a frame
img = sensor.snapshot()
img_np = img.to_numpy_ref() # 获取 RGB888 ndarray 引用
# 调用 cv_lite 扩展的霍夫圆检测函数,返回圆参数列表 [x, y, r, ...]
circles = cv_lite.rgb888_find_circles(
image_shape, img_np, dp, minDist, param1, param2, minRadius, maxRadius
)
# 遍历检测到的圆形,绘制圆形框
for i in range(0, len(circles), 3):
x = circles[i]
y = circles[i + 1]
r = circles[i + 2]
img.draw_circle(x, y, r, color=(255, 0, 0), thickness=2) # 红色圆圈
img.draw_string_advanced(0, 0, 30, 'FPS: '+str("%.3f"%(clock.fps())), color = (255, 255, 255))
# 显示结果图像 / Show image with blobs
Display.show_image(img, x=round((lcd_width-sensor.width())/2),y=round((lcd_height-sensor.height())/2))
# 垃圾回收 / Garbage collect
gc.collect()
# 打印帧率 / Print FPS
print("findcircles:", clock.fps())
# -------------------------------
# 程序退出时释放资源 / Cleanup on exit
# -------------------------------
sensor.stop()
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
MediaManager.deinit()
实验结果
在CanMV IDE中运行代码,用户可自行调整参数,比如最小圆半径过滤一些干扰,识别结果如下:
圆形识别:
原图:
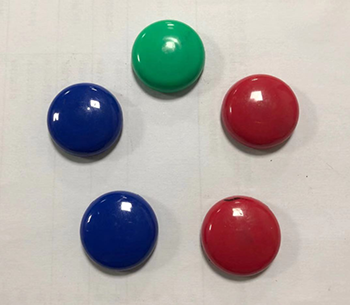
实验结果: