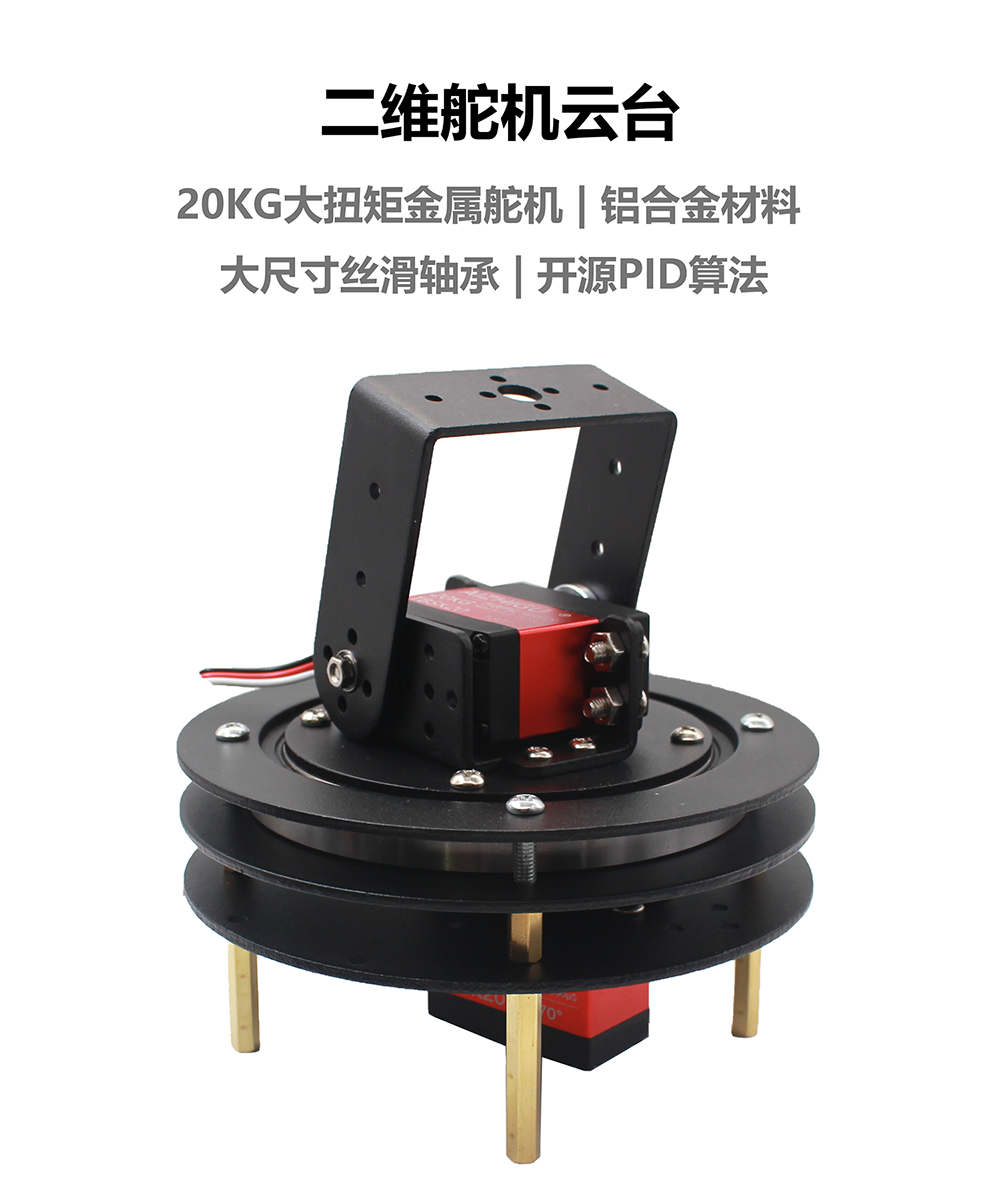
云台介绍和组装
二维舵机云台是一种通过两个独立舵机实现水平(X轴)和垂直(Y轴)方向旋转的机械结构,广泛应用于机器人、安防监控、无人机、智能设备等领域,旨在扩展设备的视野范围并实现精准角度控制。其核心由两个舵机(如 MG90S、SG90 等型号)构成,分别负责 X 轴(水平)和 Y 轴(垂直)的转动,通过 PWM 信号控制舵机角度,配合微控制器(如树莓派、Arduino)实现精确的方向调整。
典型应用场景
- 安防与监控:实现 360° 无死角巡航,配合红外或高清摄像头进行周界防范。
- 无人机与航模:稳定拍摄设备,通过姿态传感器(如 MPU6050)补偿飞行抖动,提升画面质量。
- 机器人与智能小车:作为视觉系统的载体,用于环境感知、路径规划或人机交互。
- 教育与科研:在开源项目中常用于学习 PID 控制、机械臂运动学及图像处理算法,例如结合树莓派实现人脸检测追踪。
产品介绍
01Studio 二维舵机云台 点击购买>>

参数
| 产品参数 | |
|---|---|
| 舵机类型 | 单轴舵机 |
| 水平角度 | 270° |
| 垂直角度 | 180° |
| 控制方式 | PWM |
| 工作电压 | 5V |
| 电流 | 1-3A |
| 材质 | 铝合金 |
| 载重 | 1KG |
| 尺寸 | 长宽高: 120x120x130mm |
| 重量 | 550g |
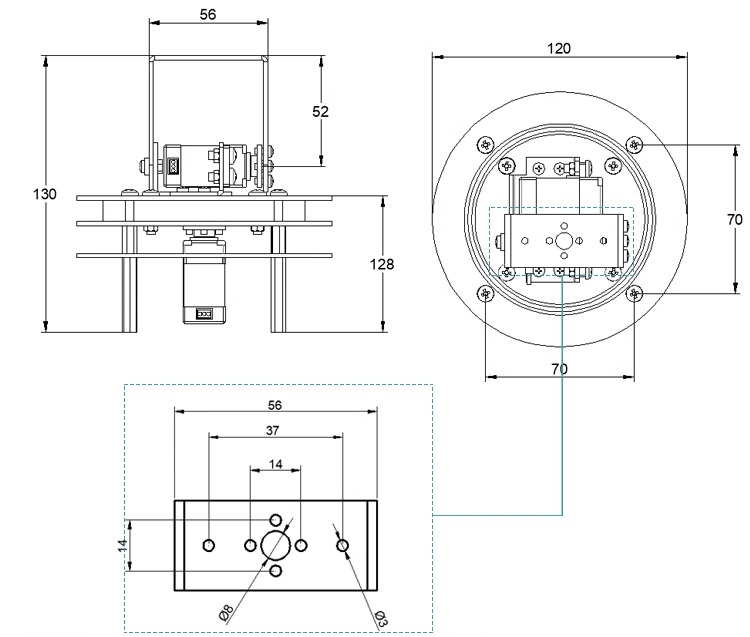
尺寸图
组装
舵机云台主体出厂已经组装好。只需要装上配套的CanMV K230或CanMV K230 mini固定支架即可。下面以01科技CanMV K230开发板进行安装说明,CanMV K230 mini安装方法一样:
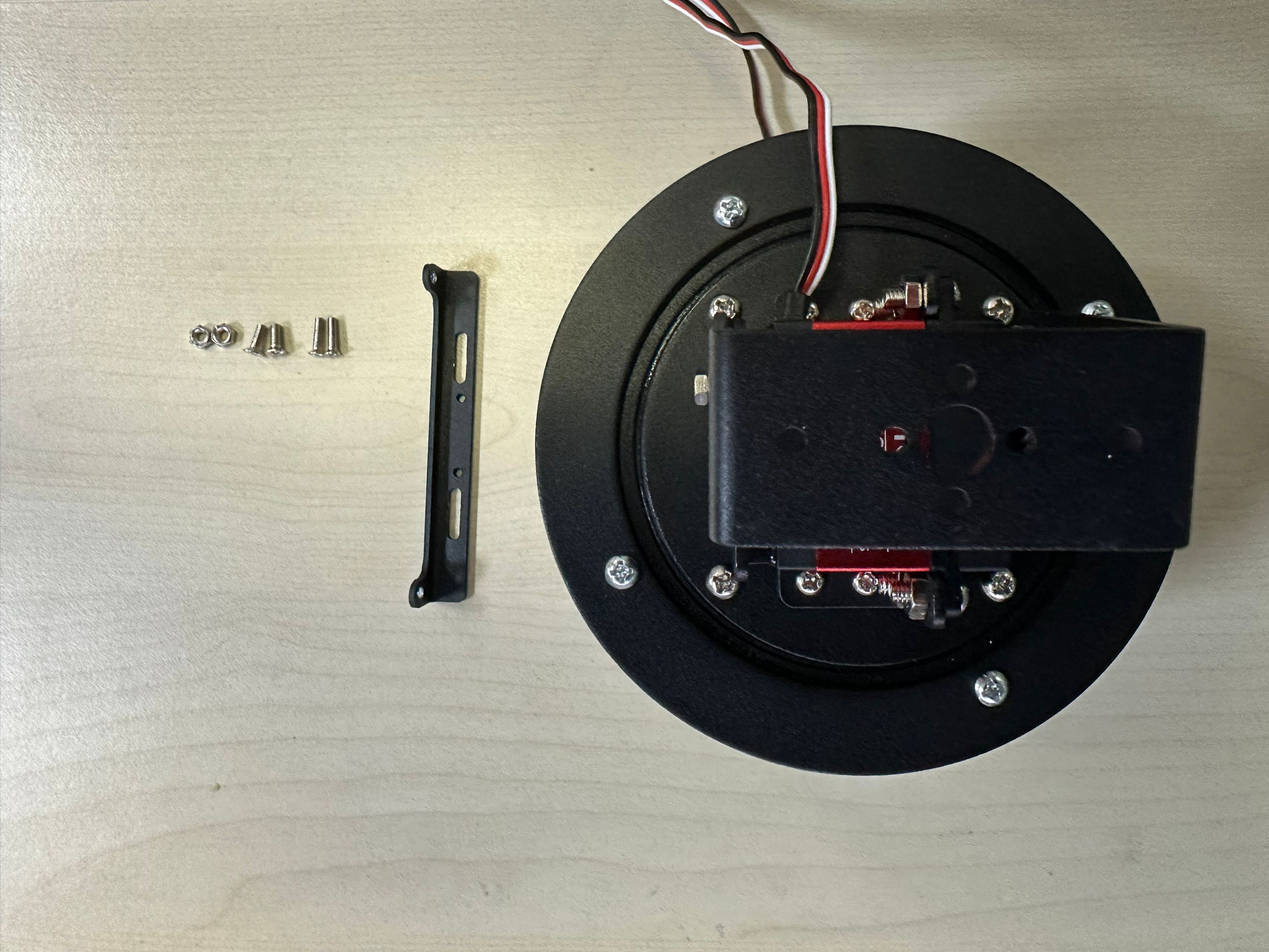
先检查清单:
- 二维舵机云台 x1
- CanMV K230开发板固定板 x1
- M3*8十字平头螺丝 x2
- M3螺母 x2
- M2.5*10十字平头螺丝 x2
固定板安装
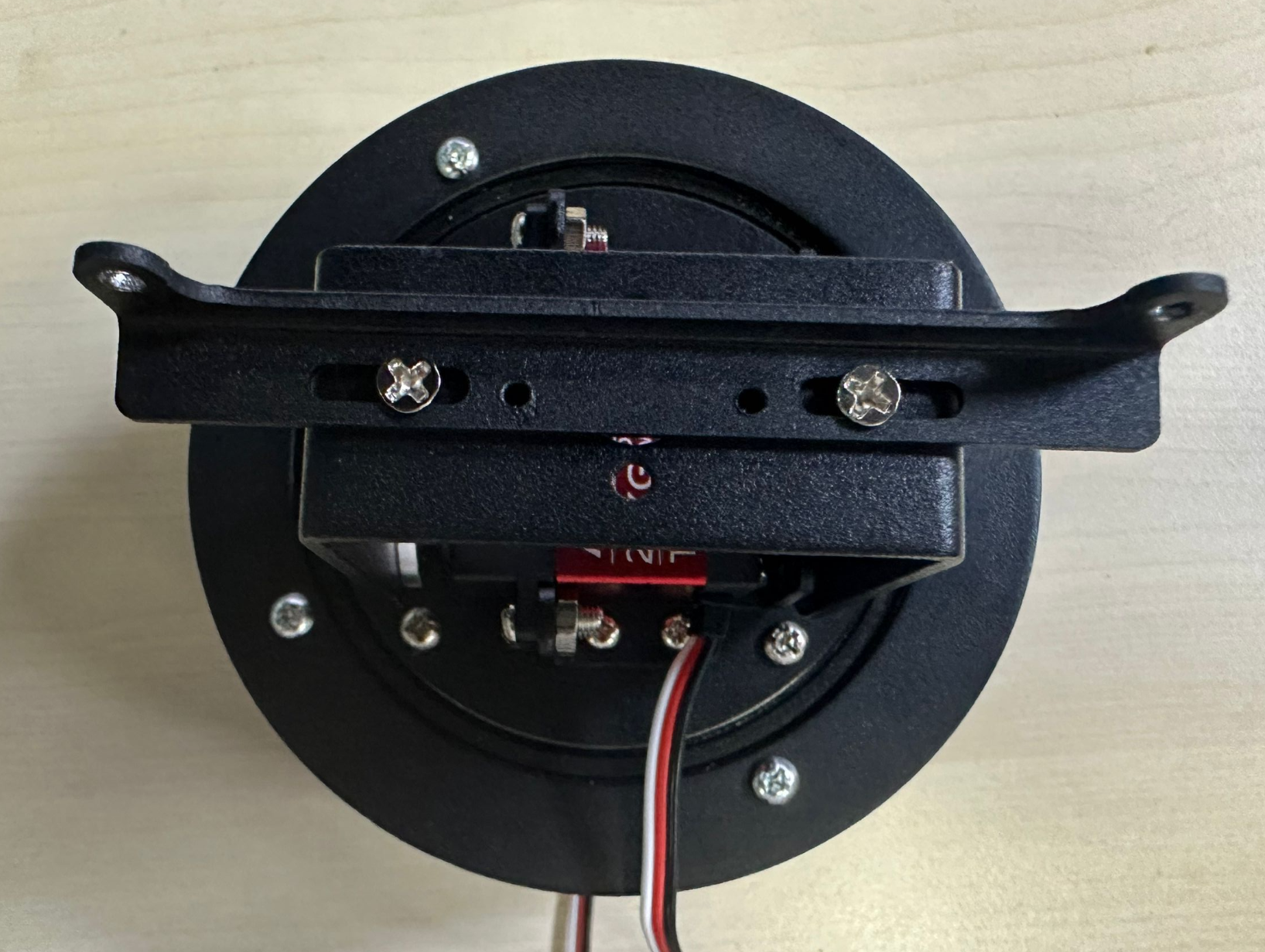
线一侧朝向自己,将固定板尽量居中放在顶部。固定板朝向如下(看2个小耳朵位置)。
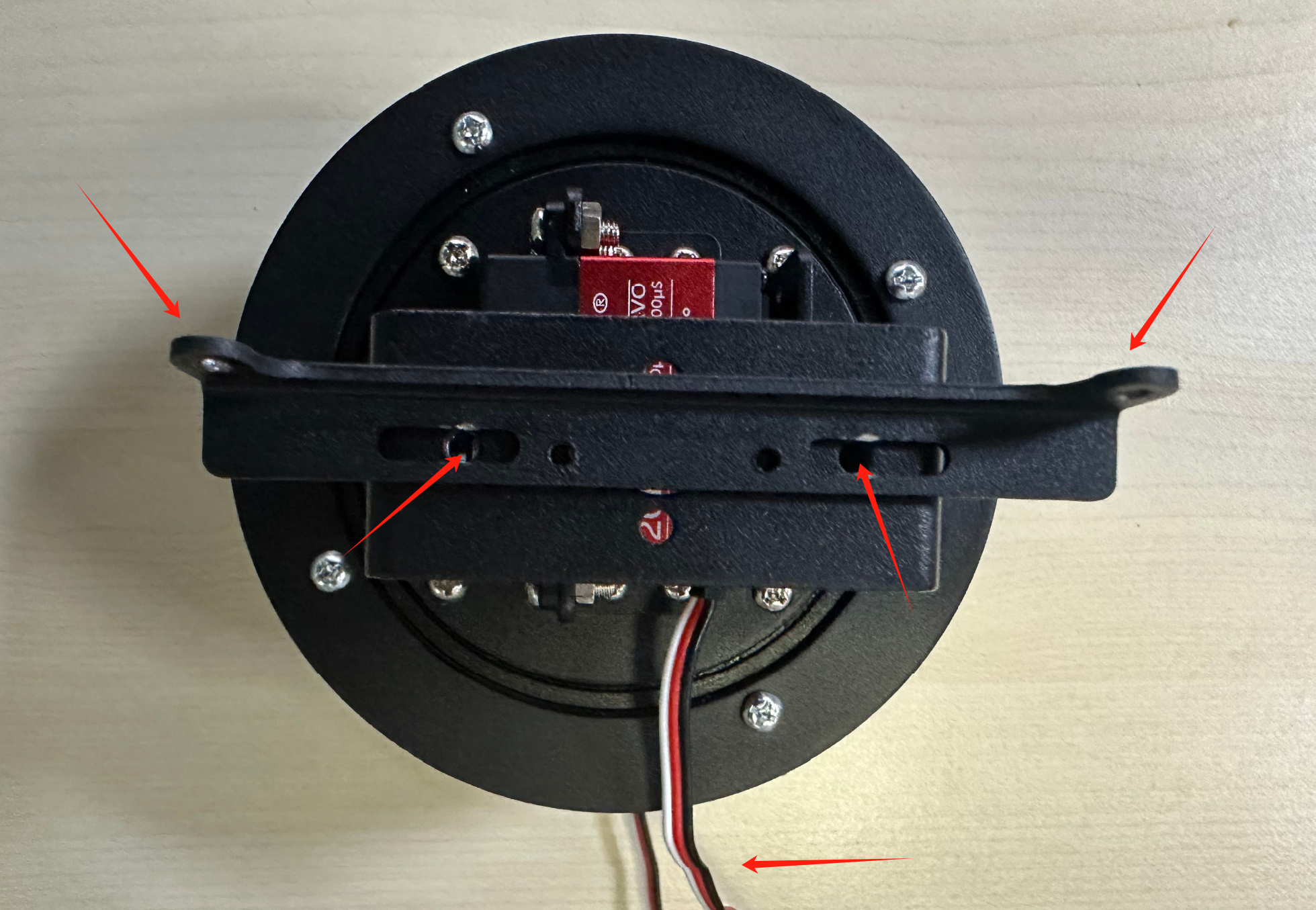
使用2个M3*8十字平头螺丝和2个M3螺母固定。

开发板安装
然后将CanMV K230开发板配套的M2.5*6螺丝拧下来:
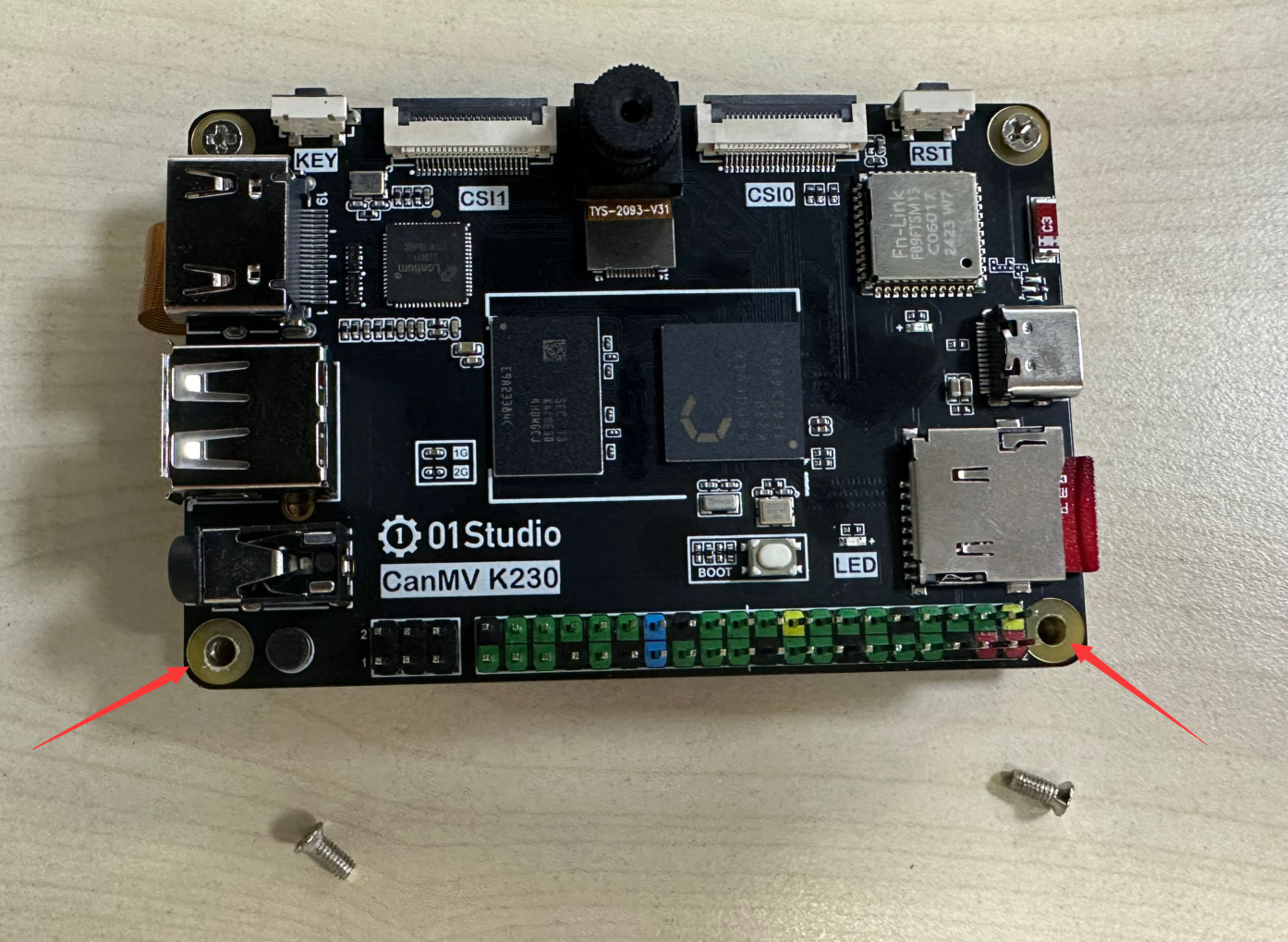
将支架固定孔对准开发板固定孔,使用M2.5*6螺丝拧紧即可。
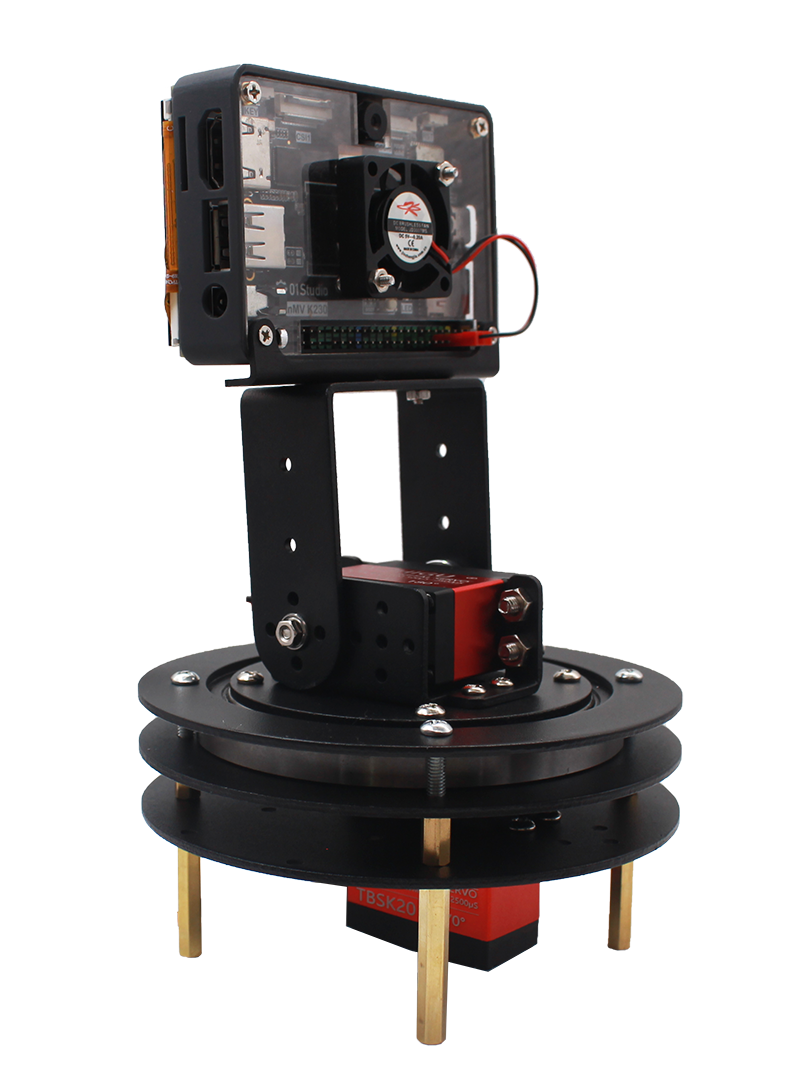
如果装了外壳,可以使用配套的M2.5*10长螺丝拧紧。
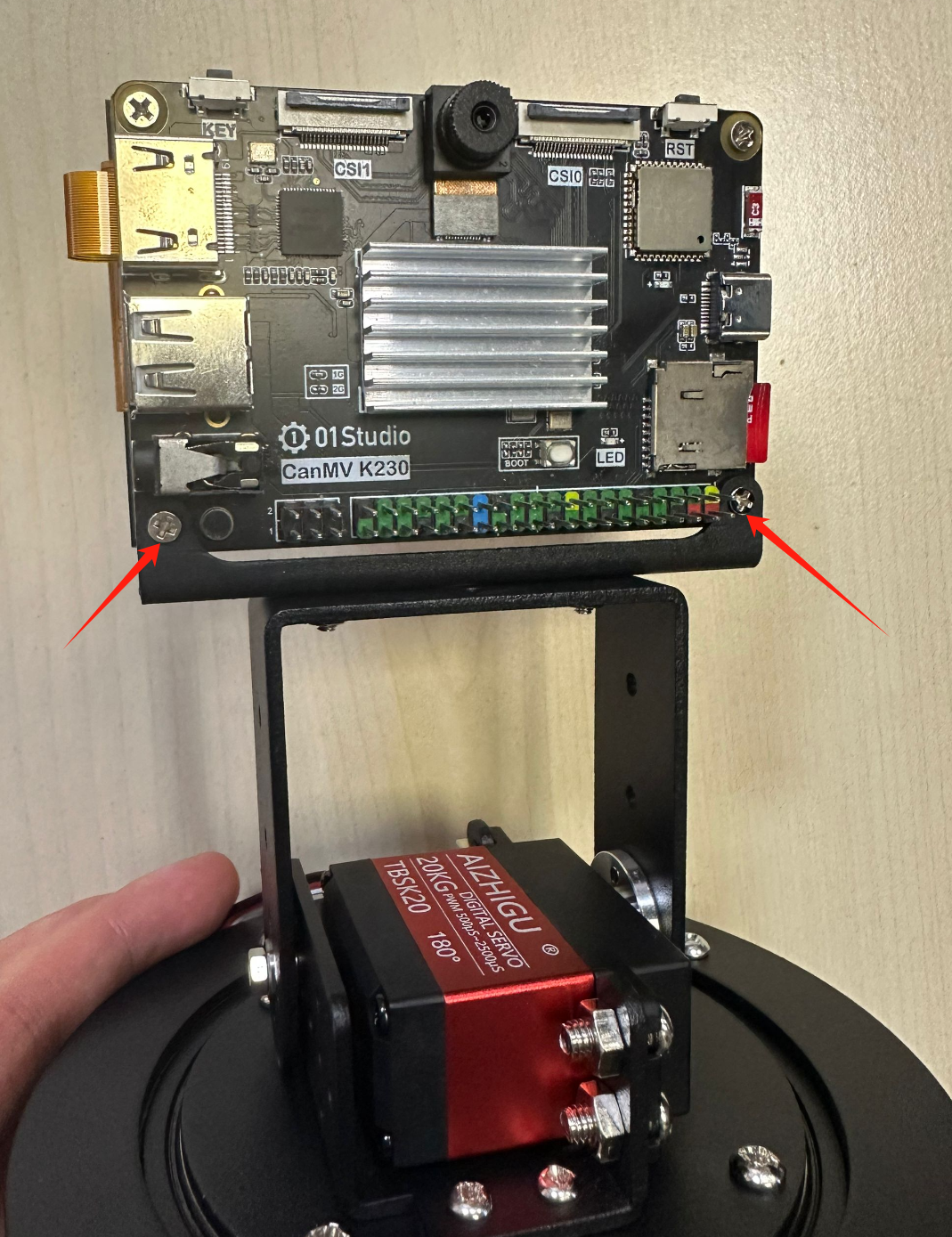
至此,组装完成。
驱动板组装
01Studio 二维舵机云台默认使用pyMotors多路舵机驱动板,通过I2C方式与K230连接,使用K230 micropython算法直接控制,无线额外单片机驱动板处理。
如果你购买的是含驱动板的二维舵机云台套餐,请检查下面清单:
- pyMotors驱动板 x1
- xh1.25转2.54mm连接线(30cm) x1
- 2.54mm公对母杜邦线(30cm)x1
- 电源适配器(5V/3A)x1
- USB转DC2.1电源线 x1
组装方法如下:
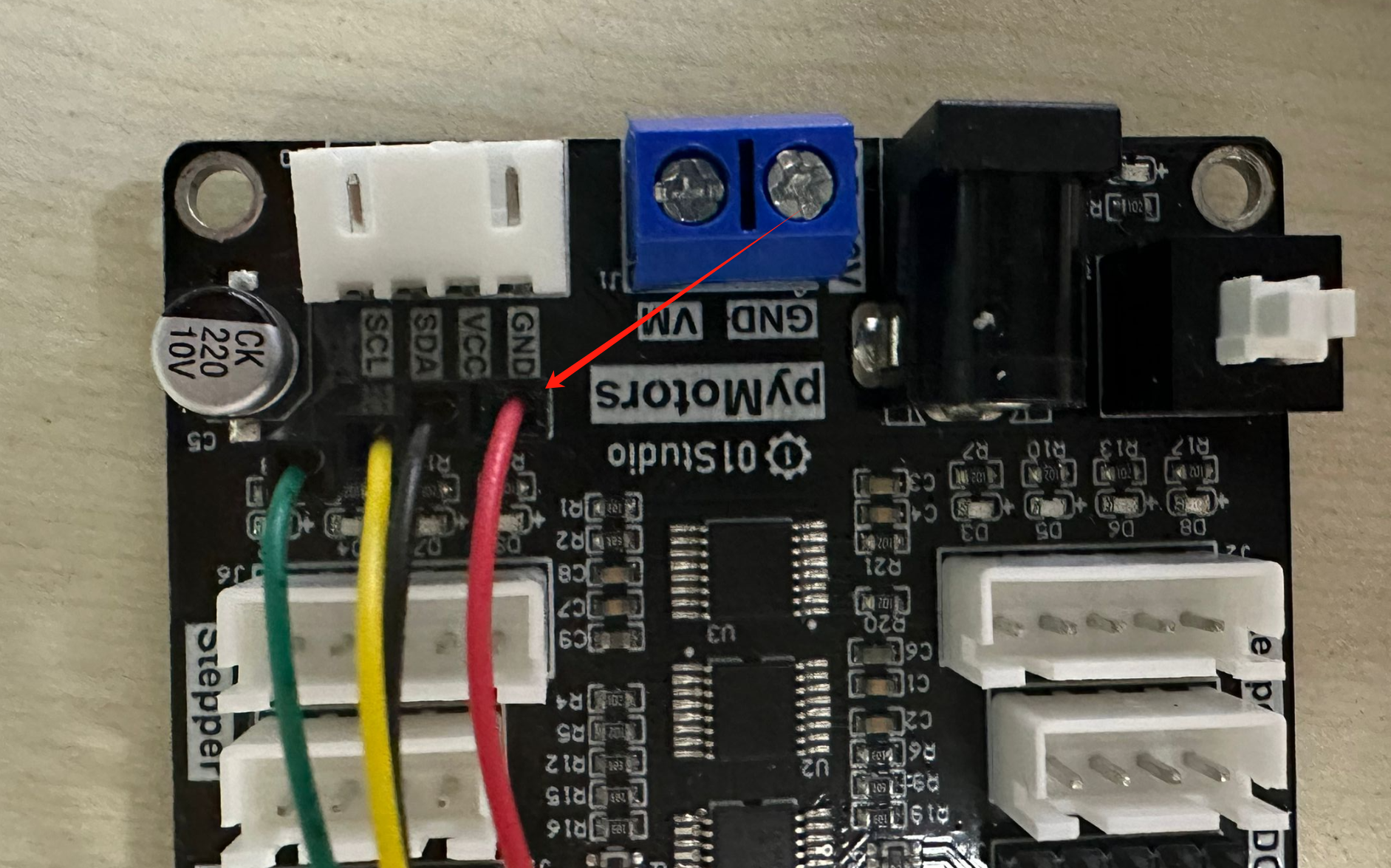
使用xh1.25转2.54mm连接线(30cm)连接K230开发板和pyMotors舵机模块:
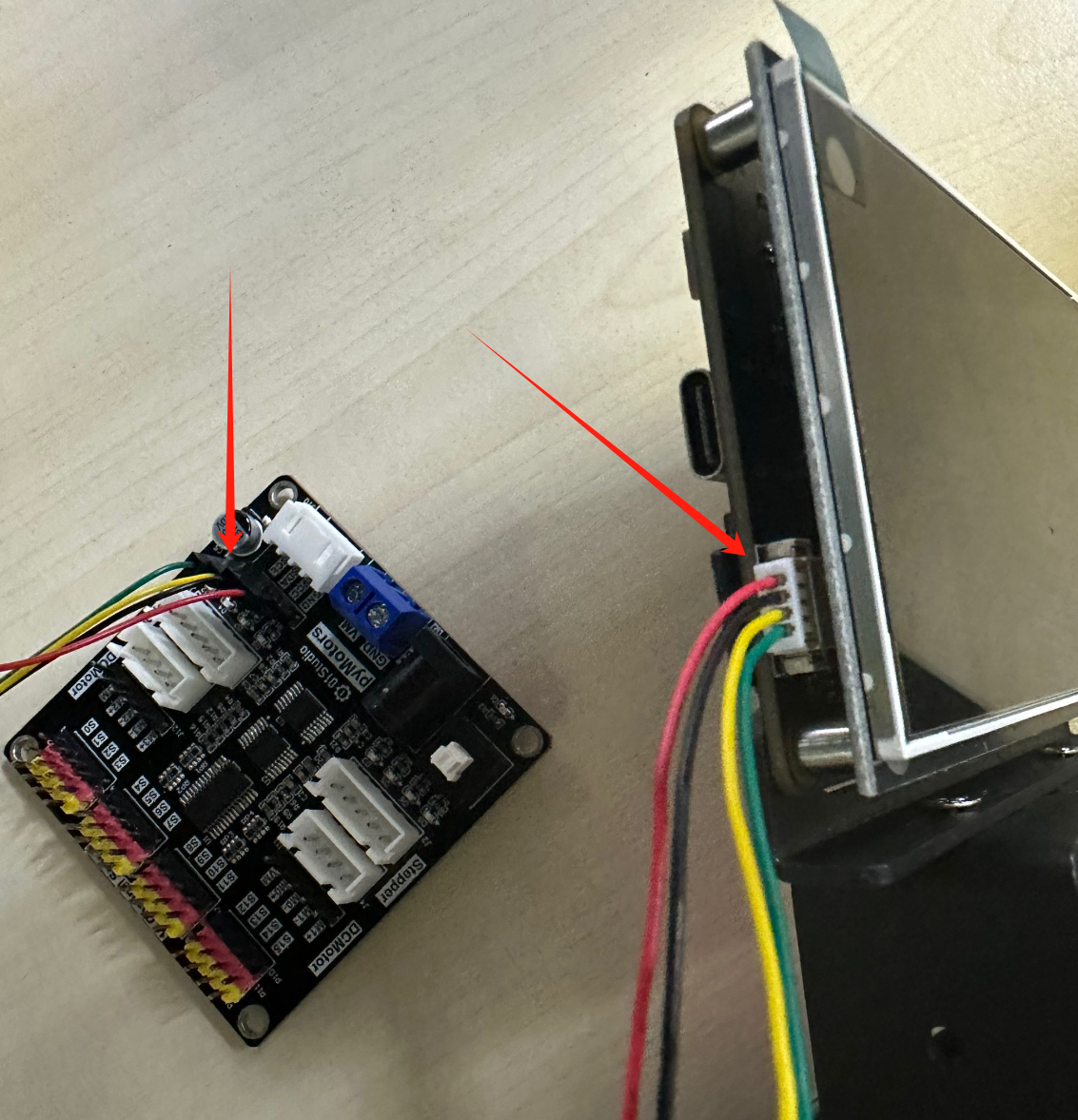
注意彩色排线颜色随机,因此第一根GND可能是红色线,注意不要接错。顺序是 GND-3.3V-SDA(IO11)-SCL(IO12)
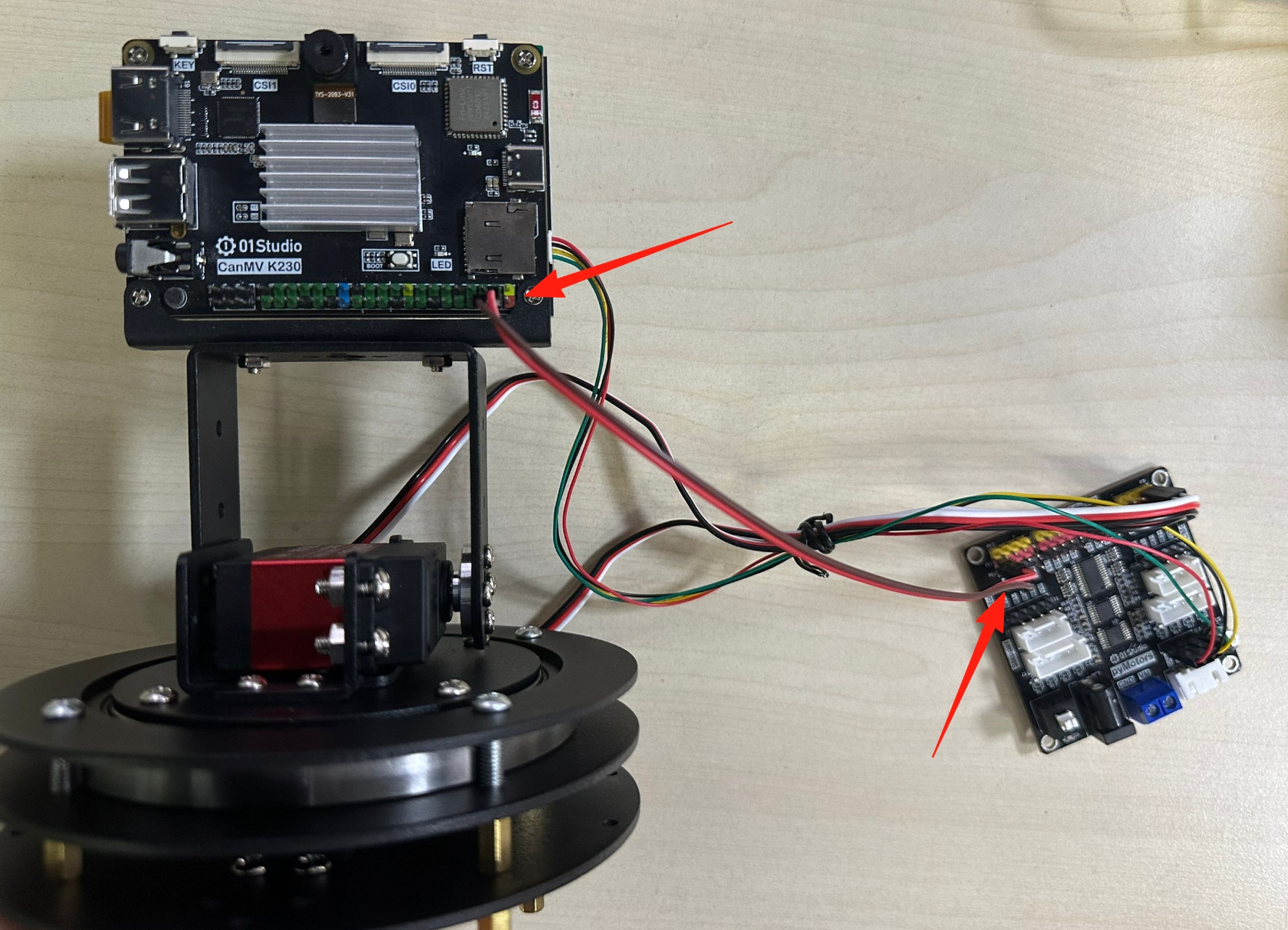
使用配套的5V适配器和电源线供电。旁边的是电源自锁开关。

关于K230供电,调试时可以使用USB通过电脑直接供电。离线运行代码可以使用配套的2.54mm母对母(30cm)杜邦线通过驱动板供电。K230排针接线可参考:K230杜邦线供电
当使用驱动板给K230供电时,适配器电源务必使用5V,超出会导致K230开发板烧坏。
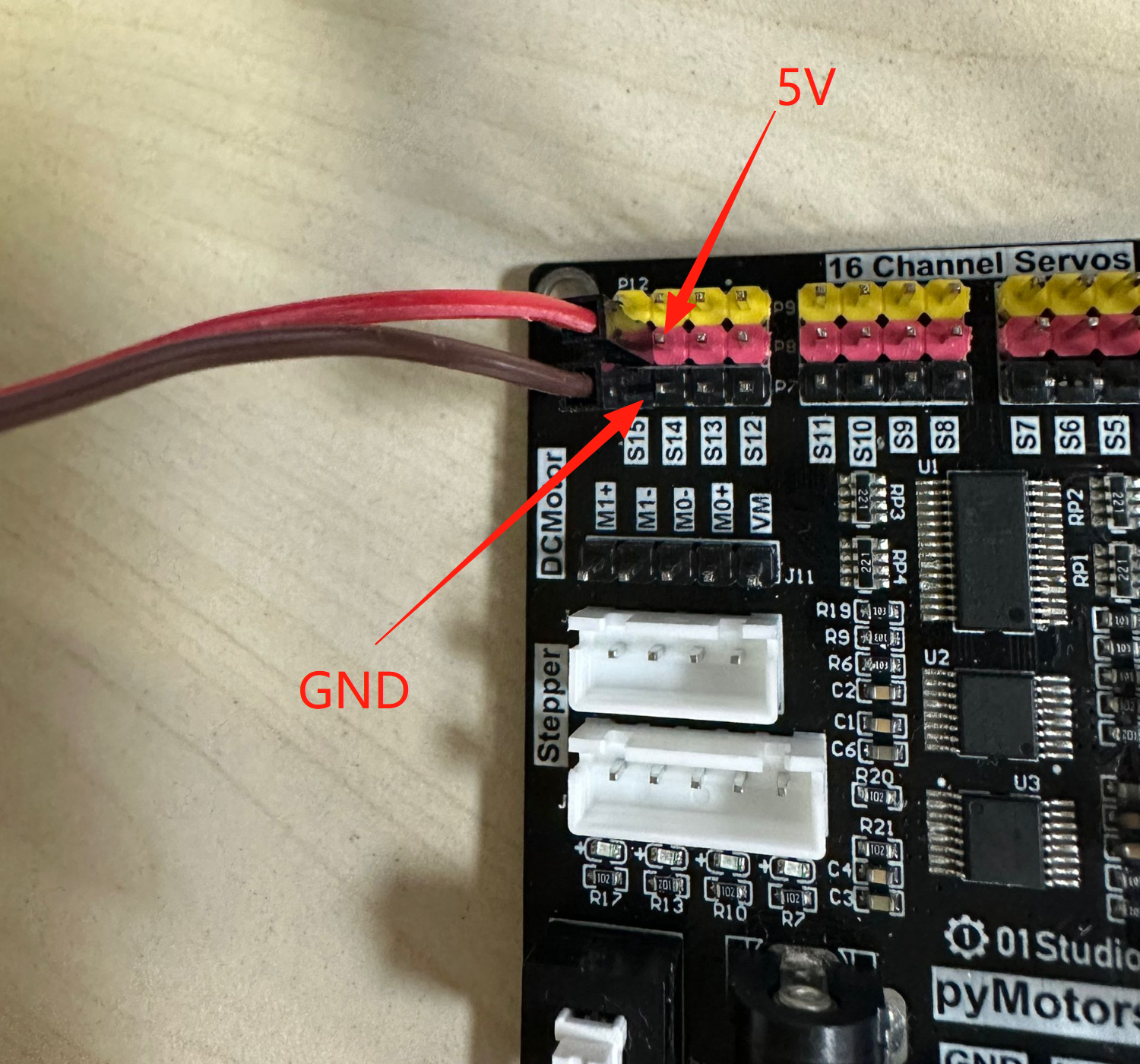
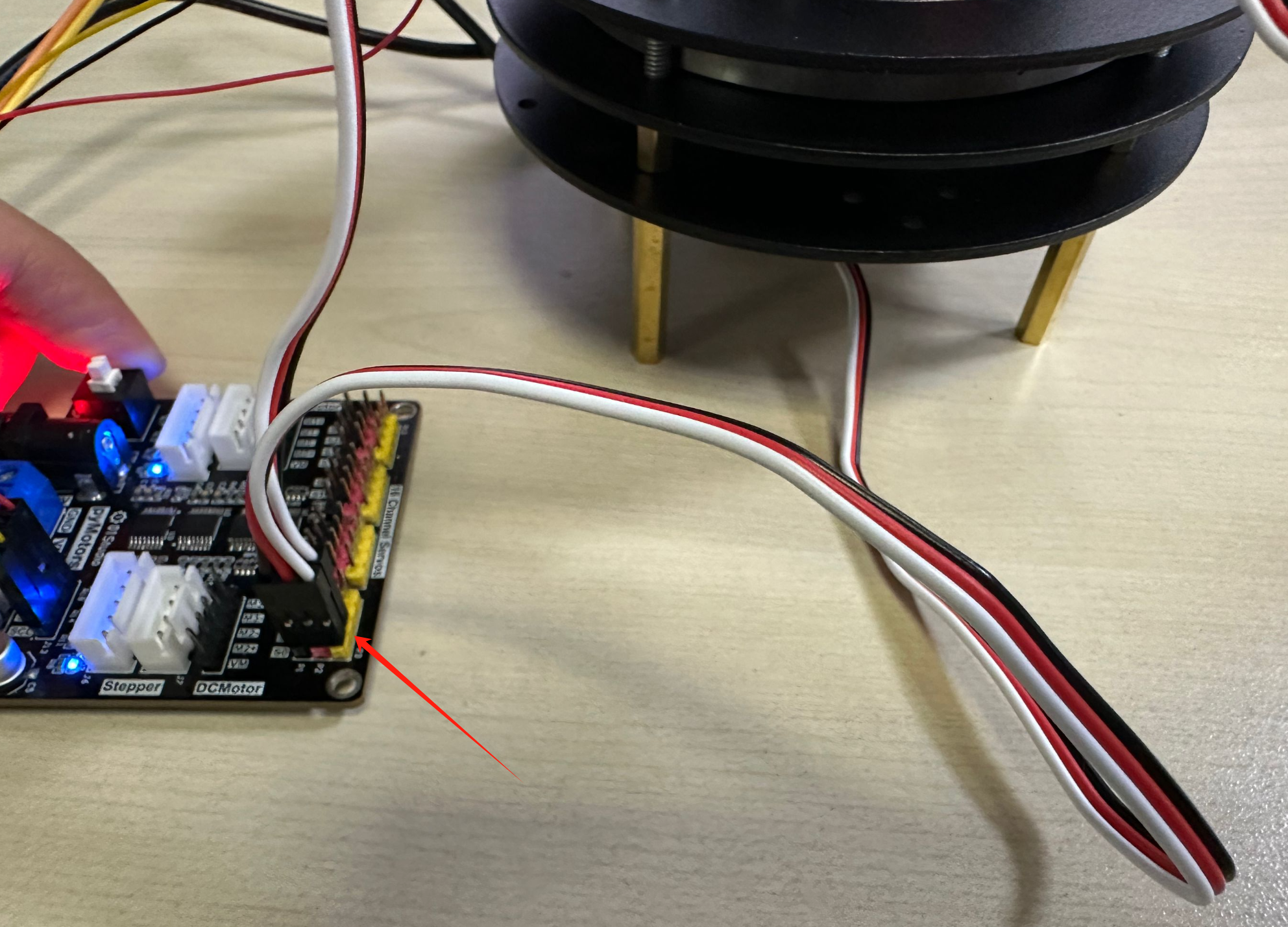
舵机驱动板这边可以借用16路任意1路的红黑排针,红色表示驱动板输入电压(给K230供电时电源输入要5V),黑色为GND。
舵机接线
将水平(X轴)270°舵机3P线接到S0,垂直(Y轴)180°舵机3P线接到S1。黑色表示GND,红色表示VCC,白色表示信号线。
到这里,舵机云台、开发板、舵机驱动板和舵机已经组装完成,下一节将讲解如何驱动舵机。