自分类学习
前言
前面视觉实验都是基于现成模型来进行识别,当我们想识别几个自定义不同物体时,可以使用自分类学习来实现拍照--训练--识别过程。
实验目的
自分类学习识别3种物体。本实验通过自分类学习识别鼠标、读卡器和SD卡。

实验讲解
CanMV K210提供自分类学习用到的模型以及代码,用户直接使用KPU来计算即可。KPU对象说明可参考KPU简介章节内容。
具体编程思路如下:
参考代码
'''
#实验名称:自分类学习
#实验平台:01Studio CanMV K210
此示例展示利用KPU神经网络,进行自分类学习的功能。
它共有三种模式:初始化、训练、分类。
操作指南:
1. 初始化模式:按下boot键,进入初始化模式,此时屏幕显示“Init”。
2. 训练模式:按下boot键,进入训练模式,此时屏幕显示“Train object 1”。
按下boot键,拍摄一张图片,屏幕显示“Train object 1\r\n\r\nBoot key to take #P2”。
按下boot键,拍摄一张图片,屏幕显示“Train object 1\r\n\r\nBoot key to take #P3”。
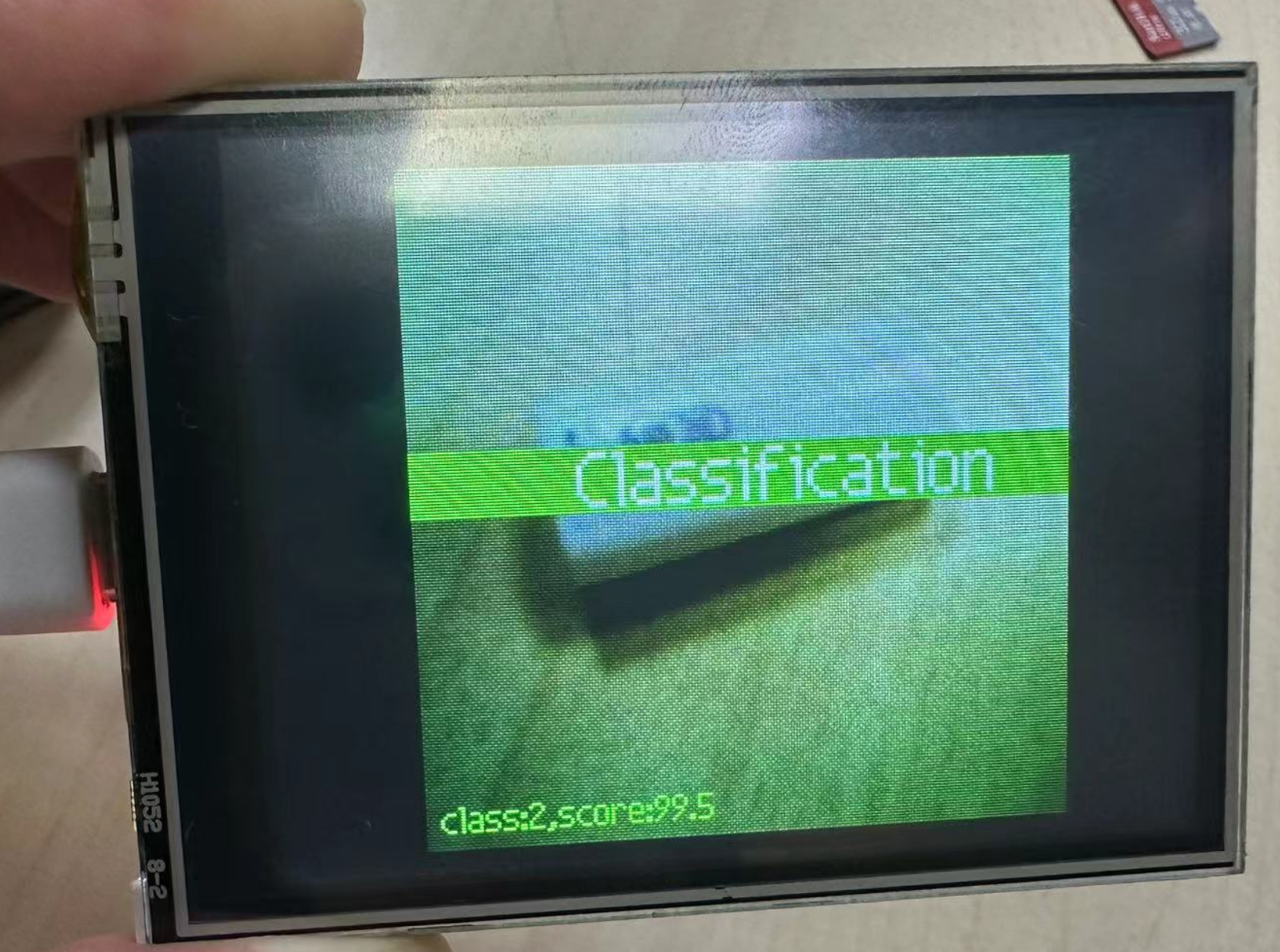
3. 分类模式:按下boot键,进入分类模式,此时屏幕显示“Classification”。
'''
import gc
import lcd
import sensor
import time
from maix import GPIO
from maix import KPU
from board import board_info
from fpioa_manager import fm
from image import Image
####################################################################################################################
class STATE(object):
IDLE = 0
INIT = 1
TRAIN_CLASS_1 = 2
TRAIN_CLASS_2 = 3
TRAIN_CLASS_3 = 4
CLASSIFY = 5
STATE_MAX = 6
class EVENT(object):
POWER_ON = 0 # virtual event, 用于上电初始化
BOOT_KEY = 1 # boot键按下
BOOT_KEY_LONG_PRESS = 2 # boot键长按约3秒
EVENT_NEXT_MODE = 3 # virtual event, 用于切换到下一个模式
EVENT_MAX = 4
class StateMachine(object):
def __init__(self, state_handlers, event_handlers, transitions):
self.previous_state = STATE.IDLE
self.current_state = STATE.IDLE
self.state_handlers = state_handlers
self.event_handlers = event_handlers
self.transitions = transitions
def reset(self):
'''
重置状态机
:return:
'''
self.previous_state = STATE.IDLE
self.current_state = STATE.IDLE
def get_next_state(self, cur_state, cur_event):
'''
根据当着状态和event, 从transitions表里查找出下一个状态
:param cur_state:
:param cur_event:
:return:
next_state: 下一状态
None: 找不到对应状态
'''
for cur, next, event in self.transitions:
if cur == cur_state and event == cur_event:
return next
return None
# execute action before enter current state
def enter_state_action(self, state, event):
'''
执行当前状态对应的进入action
:param state: 当前状态
:param event: 当前event
:return:
'''
try:
if self.state_handlers[state][0]:
self.state_handlers[state][0](self, state, event)
except Exception as e:
print(e)
# execute action of current state
def execute_state_action(self, state, event):
'''
执行当前状态action函数
:param state: 当前状态
:param event: 当前event
:return:
'''
try:
if self.state_handlers[state][1]:
self.state_handlers[state][1](self, state, event)
except Exception as e:
print(e)
# execute action when exit state
def exit_state_action(self, state, event):
'''
执行当前状态的退出action
:param state: 当前状态
:param event: 当前event
:return:
'''
try:
if self.state_handlers[state][2]:
self.state_handlers[state][2](self, state, event)
except Exception as e:
print(e)
def emit_event(self, event):
'''
发送event。根据当前状态和event,查找下一个状态,然后执行对应的action。
:param event: 要发送的event
:return:
'''
next_state = self.get_next_state(self.current_state, event)
# execute enter function and exit function when state changed
if next_state != None and next_state != self.current_state:
self.exit_state_action(self.previous_state, event)
self.previous_state = self.current_state
self.current_state = next_state
self.enter_state_action(self.current_state, event)
print("event valid: {}, cur: {}, next: {}".format(event, self.current_state, next_state))
# call state action for each event
self.execute_state_action(self.current_state, event)
def engine(self):
'''
状态机引擎,用于执行状态机
:return:
'''
pass
def restart(self):
'''
重新启动状态机程序
:return:
'''
global features
self.reset()
features.clear()
self.emit_event(EVENT.POWER_ON)
def enter_state_idle(self, state, event):
print("enter state: idle")
def exit_state_idle(self, state, event):
print("exit state: idle")
def state_idle(self, state, event):
global central_msg
print("current state: idle")
central_msg = None
def enter_state_init(self, state, event):
global img_init
print("enter state: init")
img_init = Image(size=(lcd.width(), lcd.height()))
def exit_state_init(self, state, event):
print("exit state: init")
del img_init
def state_init(self, state, event):
print("current state: init, event: {}".format(event))
# switch to next state when boot key is pressed
if event == EVENT.BOOT_KEY:
self.emit_event(EVENT.EVENT_NEXT_MODE)
elif event == EVENT.BOOT_KEY_LONG_PRESS:
restart(self)
return
def enter_state_train_class_1(self, state, event):
print("enter state: train class 1")
global train_pic_cnt, central_msg, bottom_msg
train_pic_cnt = 0
central_msg = "Train class 1"
bottom_msg = "Take pictures of 1st class"
def exit_state_train_class_1(self, state, event):
print("exit state: train class 1")
def state_train_class_1(self, state, event):
global kpu, central_msg, bottom_msg, features, train_pic_cnt
global state_machine
print("current state: class 1")
if event == EVENT.BOOT_KEY_LONG_PRESS:
restart(self)
return
if train_pic_cnt == 0: # 0 is used for prompt only
features.append([])
train_pic_cnt += 1
elif train_pic_cnt <= max_train_pic:
central_msg = None
img = sensor.snapshot()
feature = kpu.run_with_output(img, get_feature=True)
features[0].append(feature)
bottom_msg = "Class 1: #P{}".format(train_pic_cnt)
train_pic_cnt += 1
else:
state_machine.emit_event(EVENT.EVENT_NEXT_MODE)
def enter_state_train_class_2(self, state, event):
print("enter state: train class 2")
global train_pic_cnt, central_msg, bottom_msg
train_pic_cnt = 0
central_msg = "Train class 2"
bottom_msg = "Change to 2nd class please"
def exit_state_train_class_2(self, state, event):
print("exit state: train class 2")
def state_train_class_2(self, state, event):
global kpu, central_msg, bottom_msg, features, train_pic_cnt
global state_machine
print("current state: class 2")
if event == EVENT.BOOT_KEY_LONG_PRESS:
restart(self)
return
if train_pic_cnt == 0:
features.append([])
train_pic_cnt += 1
elif train_pic_cnt <= max_train_pic:
central_msg = None
img = sensor.snapshot()
feature = kpu.run_with_output(img, get_feature=True)
features[1].append(feature)
bottom_msg = "Class 2: #P{}".format(train_pic_cnt)
train_pic_cnt += 1
else:
state_machine.emit_event(EVENT.EVENT_NEXT_MODE)
def enter_state_train_class_3(self, state, event):
print("enter state: train class 3")
global train_pic_cnt, central_msg, bottom_msg
train_pic_cnt = 0
central_msg = "Train class 3"
bottom_msg = "Change to 3rd class please"
def exit_state_train_class_3(self, state, event):
print("exit state: train class 3")
def state_train_class_3(self, state, event):
global kpu, central_msg, bottom_msg, features, train_pic_cnt
global state_machine
print("current state: class 3")
if event == EVENT.BOOT_KEY_LONG_PRESS:
restart(self)
return
if train_pic_cnt == 0:
features.append([])
train_pic_cnt += 1
elif train_pic_cnt <= max_train_pic:
central_msg = None
img = sensor.snapshot()
feature = kpu.run_with_output(img, get_feature=True)
features[2].append(feature)
bottom_msg = "Class 3: #P{}".format(train_pic_cnt)
train_pic_cnt += 1
else:
state_machine.emit_event(EVENT.EVENT_NEXT_MODE)
def enter_state_classify(self, state, event):
global central_msg, bottom_msg
print("enter state: classify")
central_msg = "Classification"
bottom_msg = "Training complete! Start classification"
def exit_state_classify(self, state, event):
print("exit state: classify")
def state_classify(self, state, event):
global central_msg, bottom_msg
print("current state: classify, {}, {}".format(state, event))
if event == EVENT.BOOT_KEY:
central_msg = None
if event == EVENT.BOOT_KEY_LONG_PRESS:
restart(self)
return
def event_power_on(self, value=None):
print("emit event: power_on")
def event_press_boot_key(self, value=None):
global state_machine
print("emit event: boot_key")
def event_long_press_boot_key(self, value=None):
global state_machine
print("emit event: boot_key_long_press")
# state action table format:
# state: [enter_state_handler, execute_state_handler, exit_state_handler]
state_handlers = {
STATE.IDLE: [enter_state_idle, state_idle, exit_state_idle],
STATE.INIT: [enter_state_init, state_init, exit_state_init],
STATE.TRAIN_CLASS_1: [enter_state_train_class_1, state_train_class_1, exit_state_train_class_1],
STATE.TRAIN_CLASS_2: [enter_state_train_class_2, state_train_class_2, exit_state_train_class_2],
STATE.TRAIN_CLASS_3: [enter_state_train_class_3, state_train_class_3, exit_state_train_class_3],
STATE.CLASSIFY: [enter_state_classify, state_classify, exit_state_classify]
}
# event action table, can be enabled while needed
event_handlers = {
EVENT.POWER_ON: event_power_on,
EVENT.BOOT_KEY: event_press_boot_key,
EVENT.BOOT_KEY_LONG_PRESS: event_long_press_boot_key
}
# Transition table
transitions = [
[STATE.IDLE, STATE.INIT, EVENT.POWER_ON],
[STATE.INIT, STATE.TRAIN_CLASS_1, EVENT.EVENT_NEXT_MODE],
[STATE.TRAIN_CLASS_1, STATE.TRAIN_CLASS_2, EVENT.EVENT_NEXT_MODE],
[STATE.TRAIN_CLASS_2, STATE.TRAIN_CLASS_3, EVENT.EVENT_NEXT_MODE],
[STATE.TRAIN_CLASS_3, STATE.CLASSIFY, EVENT.EVENT_NEXT_MODE]
]
####################################################################################################################
class Button(object):
DEBOUNCE_THRESHOLD = 30 # 消抖阈值
LONG_PRESS_THRESHOLD = 1000 # 长按阈值
# Internal key states
IDLE = 0
DEBOUNCE = 1
SHORT_PRESS = 2
LONG_PRESS = 3
def __init__(self, state_machine):
self._state = Button.IDLE
self._key_ticks = 0
self._pre_key_state = 1
self.SHORT_PRESS_BUF = None
self.st = state_machine
def reset(self):
self._state = Button.IDLE
self._key_ticks = 0
self._pre_key_state = 1
self.SHORT_PRESS_BUF = None
def key_up(self, delta):
# print("up:{}".format(delta))
# key up时,有缓存的key信息就发出去,没有的话直接复位状态
if self.SHORT_PRESS_BUF:
self.st.emit_event(self.SHORT_PRESS_BUF)
self.reset()
def key_down(self, delta):
# print("dn:{},t:{}".format(delta, self._key_ticks))
if self._state == Button.IDLE:
self._key_ticks += delta
if self._key_ticks > Button.DEBOUNCE_THRESHOLD:
# main loop period过大时,会直接跳过去抖阶段
self._state = Button.SHORT_PRESS
self.SHORT_PRESS_BUF = EVENT.BOOT_KEY # key_up 时发送
else:
self._state = Button.DEBOUNCE
elif self._state == Button.DEBOUNCE:
self._key_ticks += delta
if self._key_ticks > Button.DEBOUNCE_THRESHOLD:
self._state = Button.SHORT_PRESS
self.SHORT_PRESS_BUF = EVENT.BOOT_KEY # key_up 时发送
elif self._state == Button.SHORT_PRESS:
self._key_ticks += delta
if self._key_ticks > Button.LONG_PRESS_THRESHOLD:
self._state = Button.LONG_PRESS
self.SHORT_PRESS_BUF = None # 检测到长按,将之前可能存在的短按buffer清除,以防发两个key event出去
self.st.emit_event(EVENT.BOOT_KEY_LONG_PRESS)
elif self._state == Button.LONG_PRESS:
self._key_ticks += delta
# 最迟 LONG_PRESS 发出信号,再以后就忽略,不需要处理。key_up时再退出状态机。
pass
else:
pass
####################################################################################################################
# 未启用 state machine 的主循环,所以这里将需要循环执行的函数放在while True里
def loop_init():
global lcd, img_init
if state_machine.current_state != STATE.INIT:
return
img_init.draw_rectangle(0, 0, lcd.width(), lcd.height(), color=(0, 0, 255), fill=True, thickness=2)
img_init.draw_string(65, 90, "Self Learning Demo", color=(255, 255, 255), scale=2)
img_init.draw_string(5, 210, "short press: next", color=(255, 255, 255), scale=1)
img_init.draw_string(5, 225, "long press: restart", color=(255, 255, 255), scale=1)
lcd.display(img_init)
def loop_capture():
global central_msg, bottom_msg
img = sensor.snapshot()
if central_msg:
img.draw_rectangle(0, 90, lcd.width(), 22, color=(0, 0, 255), fill=True, thickness=2)
img.draw_string(55, 90, central_msg, color=(255, 255, 255), scale=2)
if bottom_msg:
img.draw_string(5, 208, bottom_msg, color=(0, 0, 255), scale=1)
lcd.display(img)
def loop_classify():
global central_msg, bottom_msg
img = sensor.snapshot()
scores = []
feature = kpu.run_with_output(img, get_feature=True)
high = 0
index = 0
for j in range(len(features)):
for f in features[j]:
score = kpu.feature_compare(f, feature)
if score > high:
high = score
index = j
if high > THRESHOLD:
bottom_msg = "class:{},score:{:2.1f}".format(index + 1, high)
else:
bottom_msg = None
# display info
if central_msg:
print("central_msg:{}".format(central_msg))
img.draw_rectangle(0, 90, lcd.width(), 22, color=(0, 255, 0), fill=True, thickness=2)
img.draw_string(55, 90, central_msg, color=(255, 255, 255), scale=2)
if bottom_msg:
print("bottom_msg:{}".format(bottom_msg))
img.draw_string(5, 208, bottom_msg, color=(0, 255, 0), scale=1)
lcd.display(img)
####################################################################################################################
# main loop
features = []
THRESHOLD = 98.5 # 比对阈值,越大越严格
train_pic_cnt = 0 # 当前分类已训练图片数量
max_train_pic = 5 # 每个类别最多训练图片数量
central_msg = None # 屏幕中间显示的信息
bottom_msg = None # 屏幕底部显示的信息
fm.register(board_info.BOOT_KEY, fm.fpioa.GPIOHS0)
boot_gpio = GPIO(GPIO.GPIOHS0, GPIO.IN)
lcd.init()
sensor.reset() # Reset and initialize the sensor. It will
sensor.set_vflip(1) #将摄像头设置成后置方式(所见即所得)
sensor.set_hmirror(1) #GC0328摄像头(如果使用ov2640摄像头,注释此行。)
# run automatically, call sensor.run(0) to stop
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.set_windowing((224, 224))
sensor.skip_frames(time=500) # Wait for settings take effect.
kpu = KPU()
print("ready load model")
kpu.load_kmodel("/sd/mb-0.25.kmodel")
state_machine = StateMachine(state_handlers, event_handlers, transitions)
state_machine.emit_event(EVENT.POWER_ON)
btn_ticks_prev = time.ticks_ms()
boot_btn = Button(state_machine)
while True:
gc.collect()
# 计算boot key被压下或弹起的时间,用于消抖和长按检测, 并且向state machine发送事件
btn_ticks_cur = time.ticks_ms()
delta = time.ticks_diff(btn_ticks_cur, btn_ticks_prev)
btn_ticks_prev = btn_ticks_cur
if boot_gpio.value() == 0:
boot_btn.key_down(delta)
else:
boot_btn.key_up(delta)
# 未启用 state machine 的主循环,所以这里将需要循环执行的函数放在while True里
if state_machine.current_state == STATE.INIT:
loop_init()
elif state_machine.current_state == STATE.CLASSIFY:
loop_classify()
elif state_machine.current_state == STATE.TRAIN_CLASS_1 or state_machine.current_state == STATE.TRAIN_CLASS_2 \
or state_machine.current_state == STATE.TRAIN_CLASS_3:
loop_capture()
实验结果
将资料包例程源码中的 mb-0.25.kmodel 模型文件拷贝到SD卡中。
在CanMV IDE中运行上述代码,按LCD提示进行操作,分别对鼠标、读卡器、SD卡 3个物体进行拍摄5张照片操作录入。
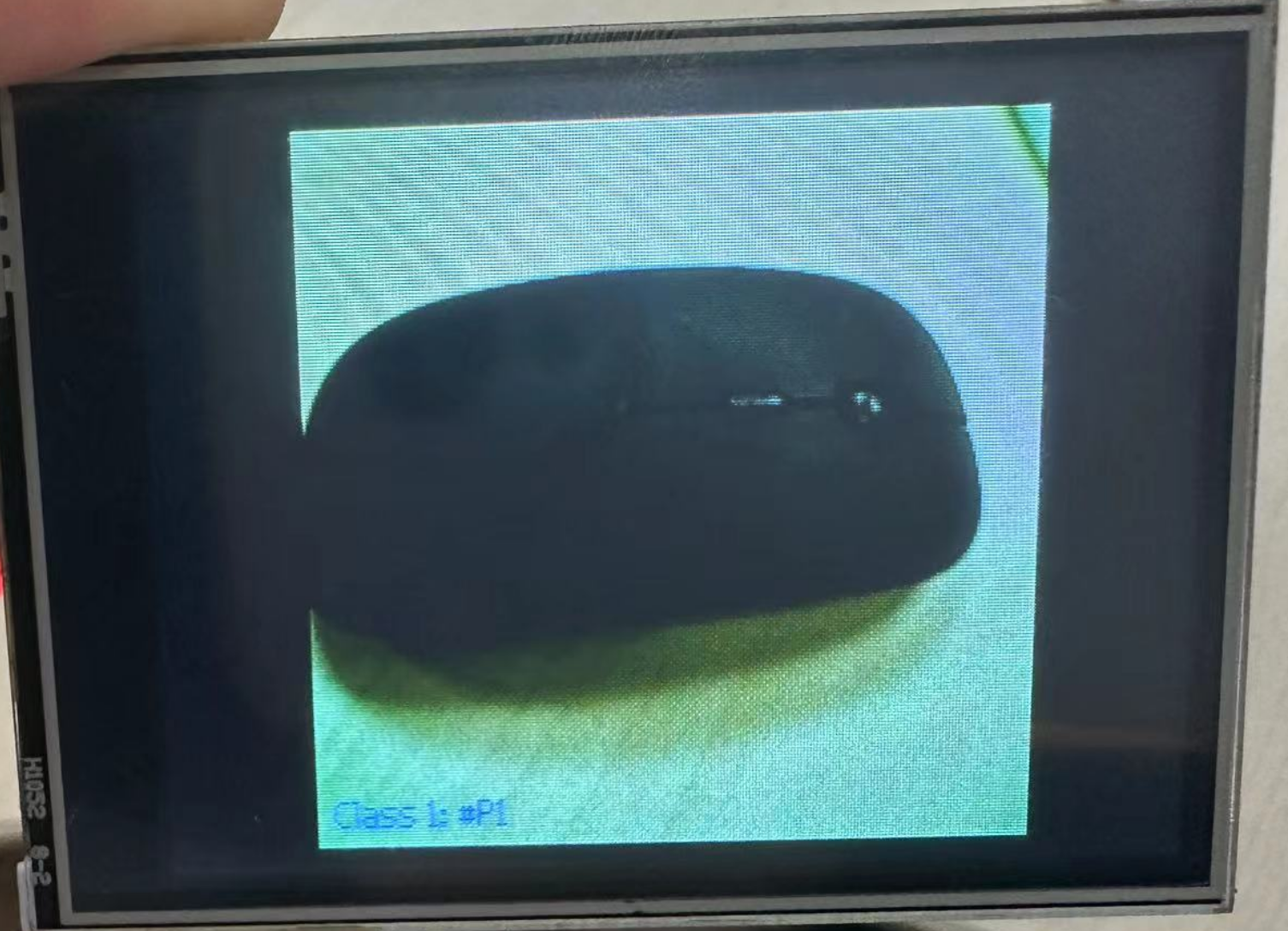
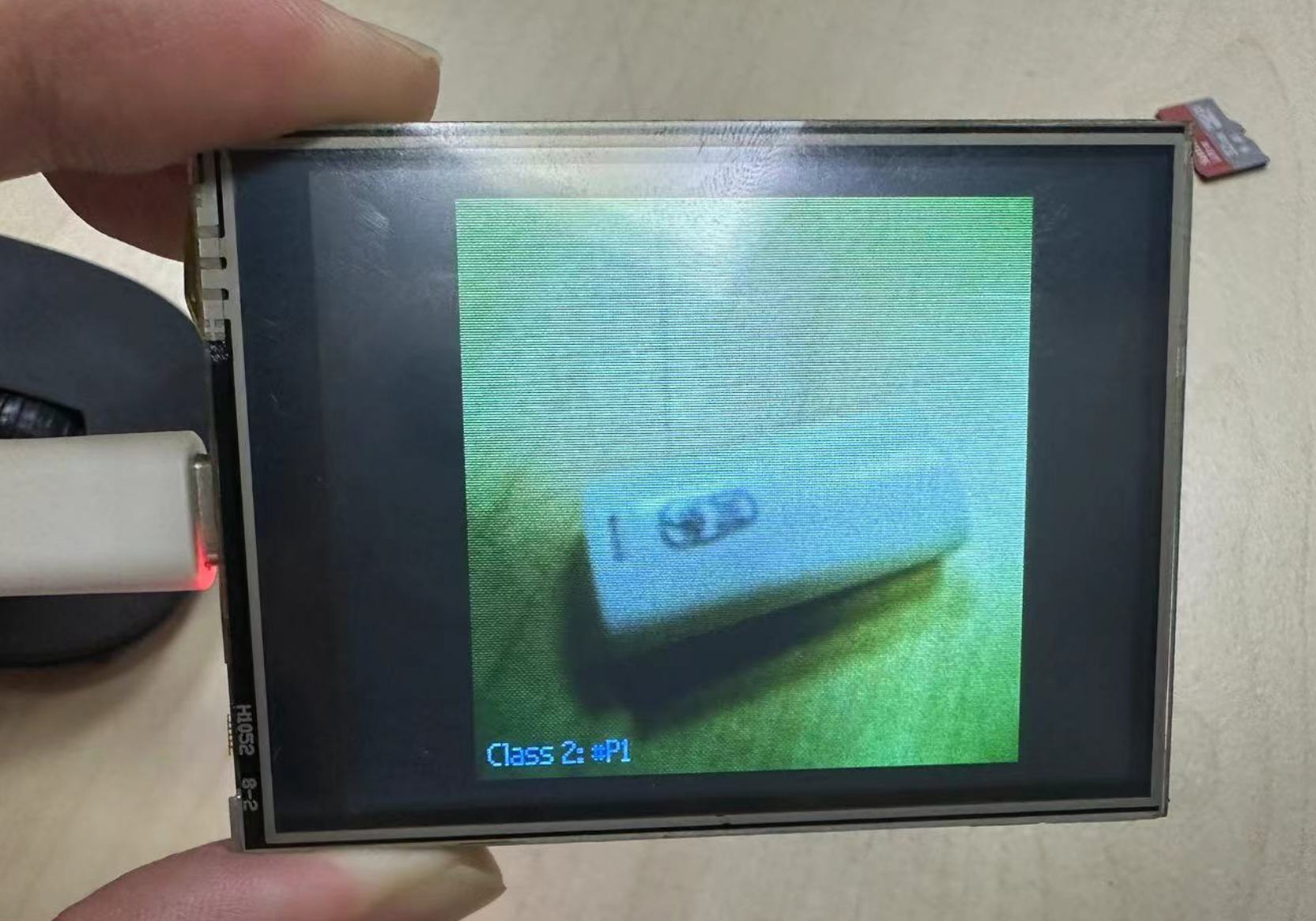
完成后将摄像头正对物体,可以看到物体被成功识别出来(按编号区分):