PID控制原理
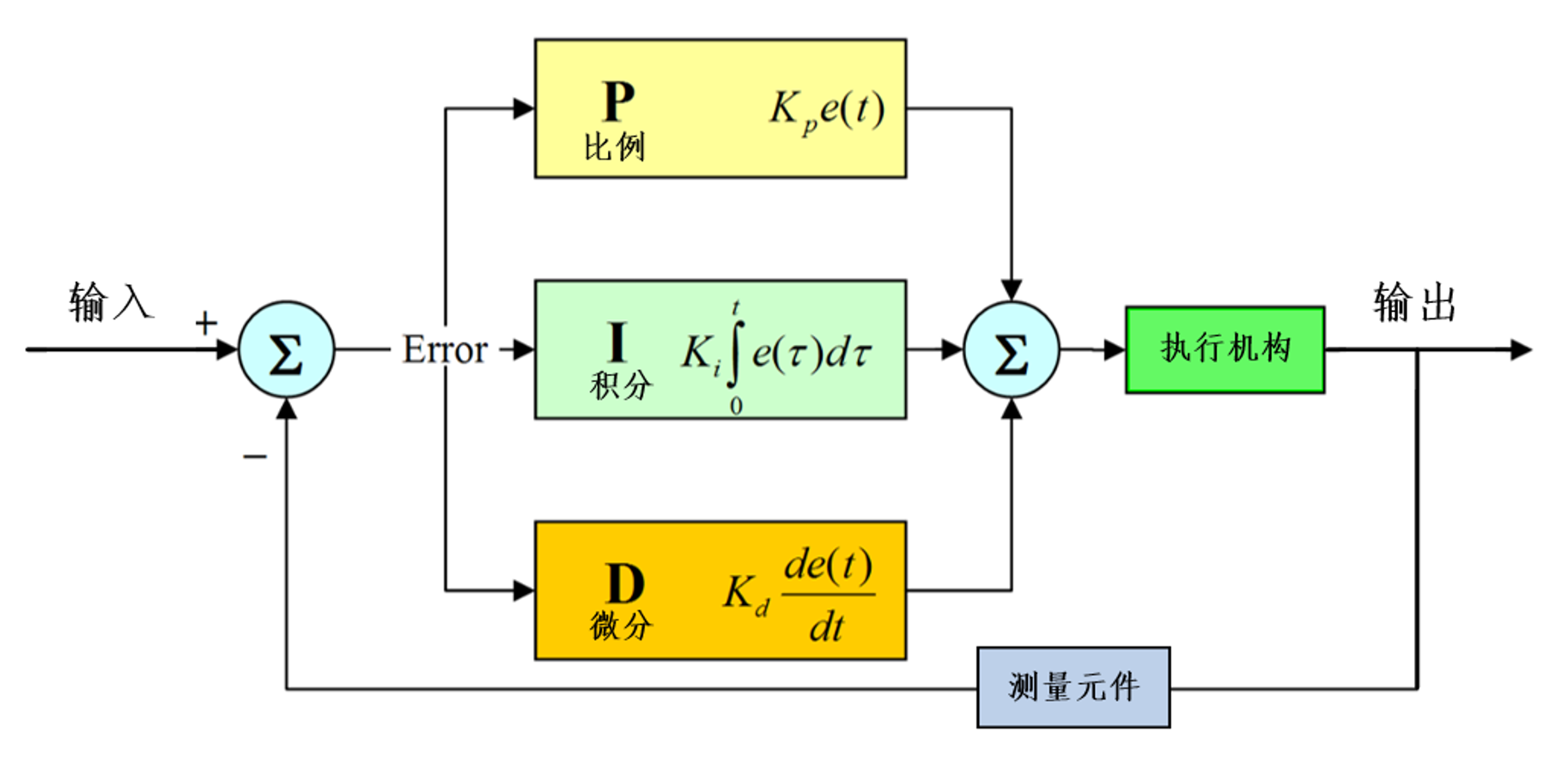
PID 算法【比例(Proportional) - 积分(Integral) - 微分控制算法(Derivative)】是工业控制、自动化领域中应用最广泛的闭环控制算法之一,其核心是通过偏差反馈动态调整控制量,使系统输出快速、稳定地接近目标值。
舵机云台常用于监控和目标跟随,比如人脸追踪,就要求摄像头始终让人脸保持在显示屏中心,当人脸移动时候实现跟随。
那么为什么要使用PID算法呢?我们不能检测到目标就直接将云台转到到相关位置么?答案是可以的,但这会存在一个“刹不住车”的问题,试想一下比如我们当前目标是要跑到一个一百米外的点,那么我们百米冲刺的速度跑过去,可想而知我们就好来不及“刹车”,冲出了终点,然后在终点来回跑,最终到达目的地。加入PID的好处就是拥有一个闭环系统,当我们距离终点较远时,可以跑快一点,当快到点终点时,跑慢一点,避免来回“震荡”,让系统更高效稳定。
关于PID控制算法原理可以查看B站这个up主的视频:https://www.bilibili.com/video/BV1et4y1i7Gm/
总结:
- P比例:控制移动速度
- I积分:控制绝度误差
- D微分:控制刹车减速
视频中提供的PID飞控在线模拟链接:点击跳转
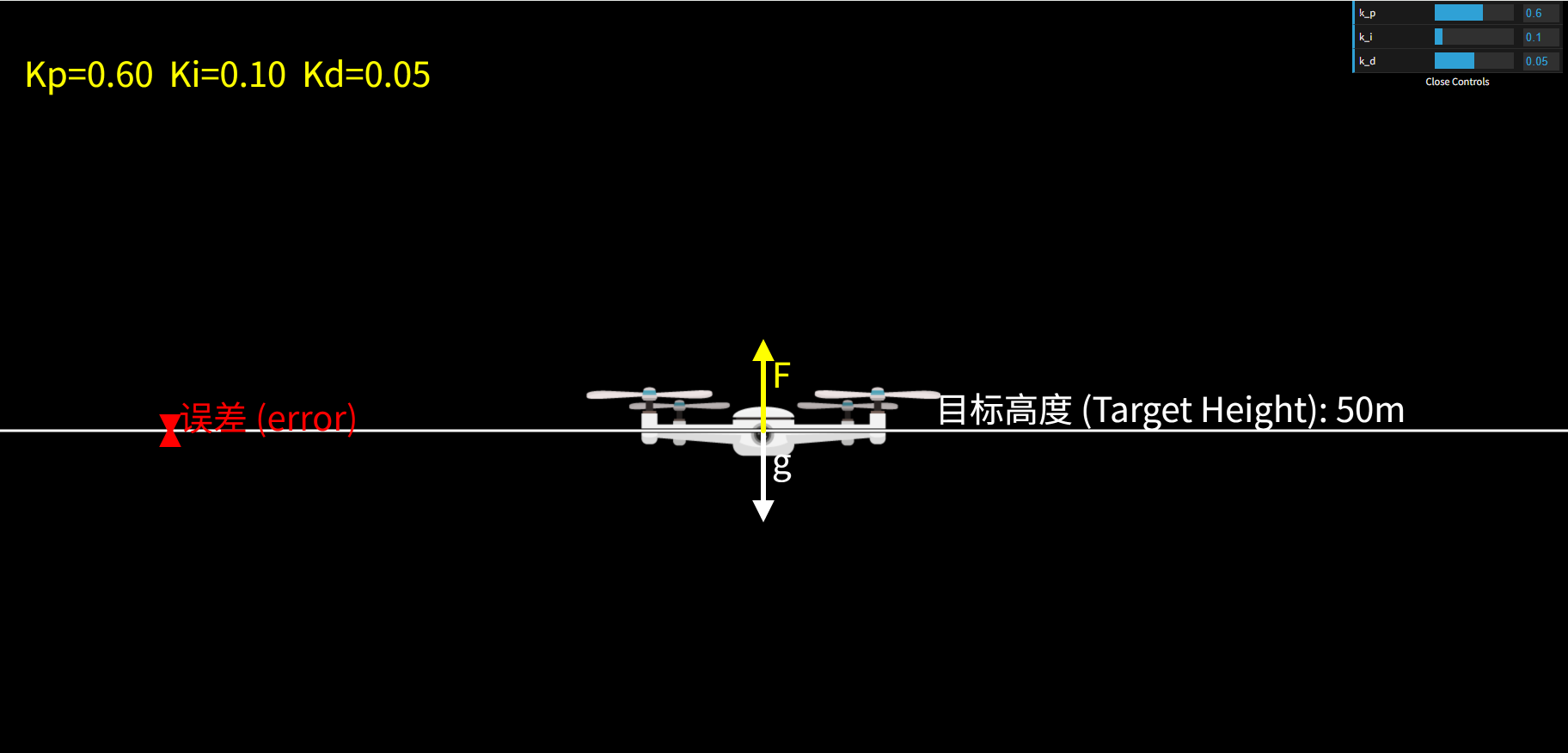
可修改右上角PID值实时调试:

PID基于二维舵机云台应用我们将在后面章节深入讲解。