云台舵机控制
本例程请使用01Studio资料包 2025-7-22 v1.3-70新版本镜像。
前言
在前面多路舵机模块章节我们已经讲解过通过如何驱动舵机。这节基于舵机云台我们再来重新讲解一下。
实验平台
01Studio CanMV K230开发板和二维舵机云台(含pyMotors驱动板)。 点击购买>>

实验目的
通过编程实现对二维舵机云台2个维度舵机任意角度的控制。
实验讲解
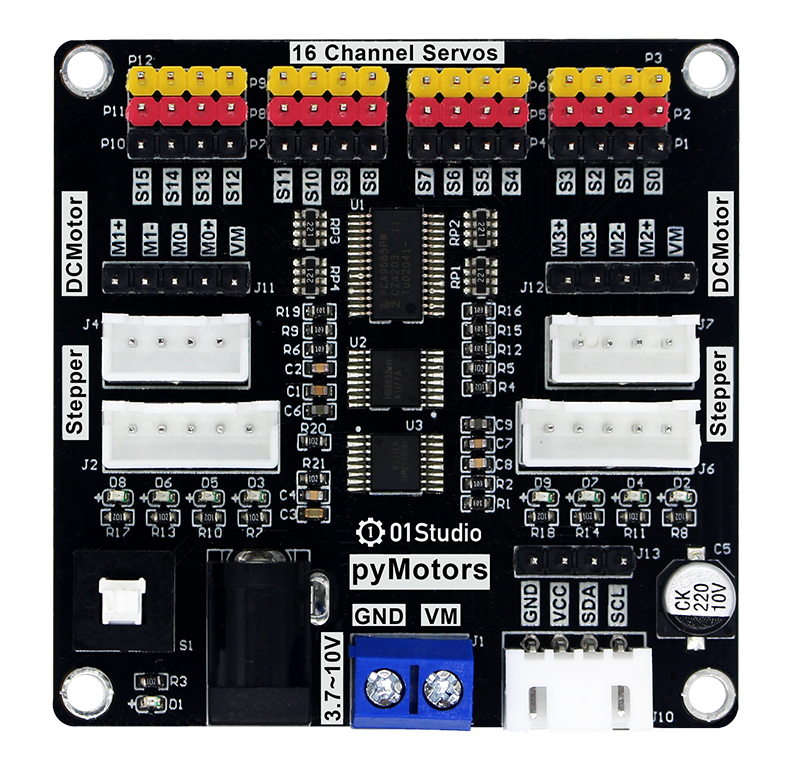
pyMotors多功能电机模块基于PCA9685,这是一款I2C转16路PWM芯片,只需要通过K230的I2C接口即可控制最大16路PWM舵机、4路直流电机、2路42步进电机或4相5线步进电机。电机供电支持3.7V-10V输入。
pyMotors模块资料包:点击下载>>
本教程使用I2C2跟pyMotors模块连接。模块使用5V电源供电。连接方法参考二维云台组装教程。
舵机出厂角度位置
01Studio二维舵机云台水平(X轴)舵机270°。出厂角度如下:
- 以线在下方为参考点,正前方为居中135°,右下角为0°,左下角为270°。

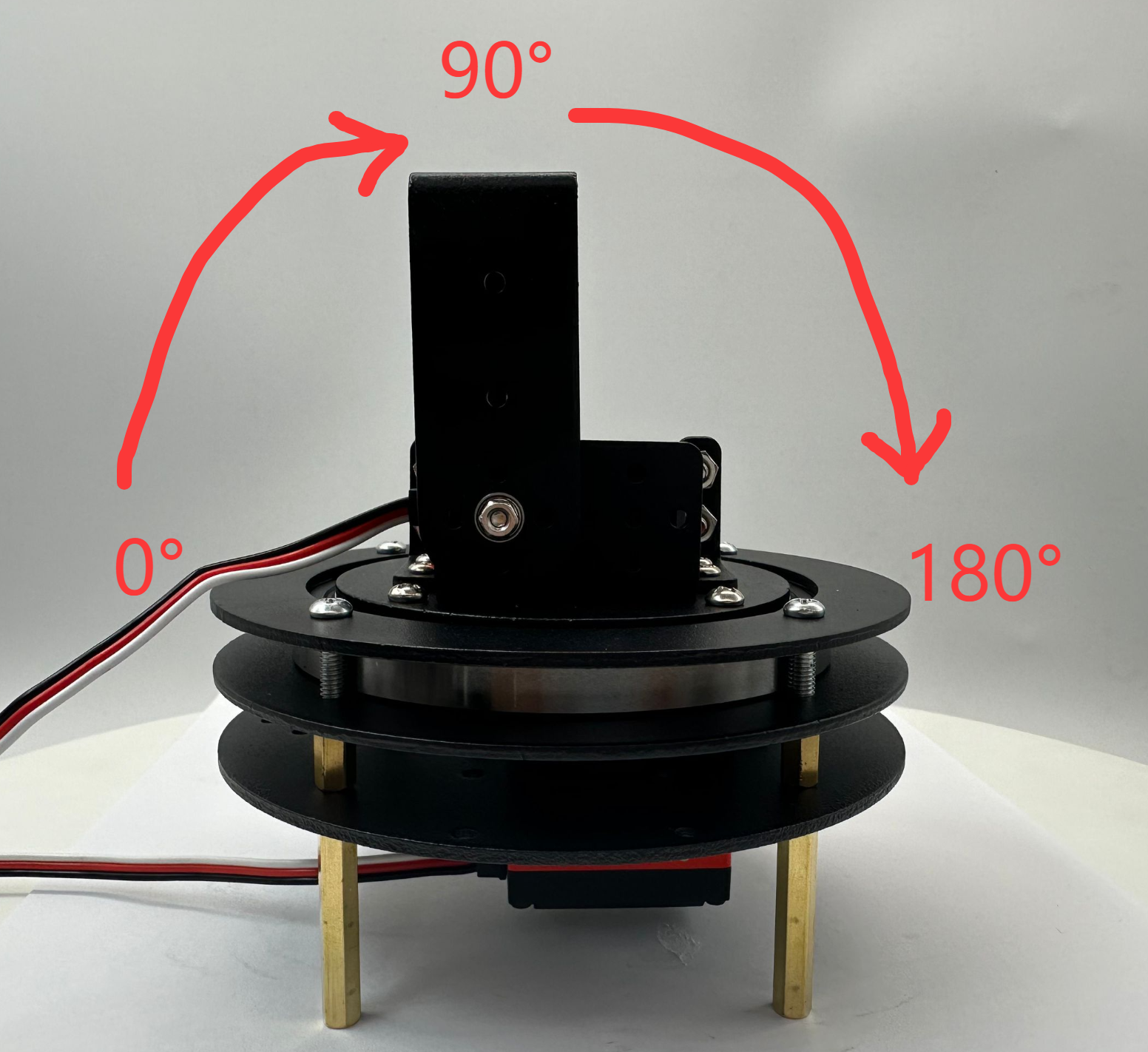
垂直(Y轴)舵机180°。出厂角度如下:
- 以线在左边为参考点,正上方为居中90°,左边是0°,右边是180°。
舵机
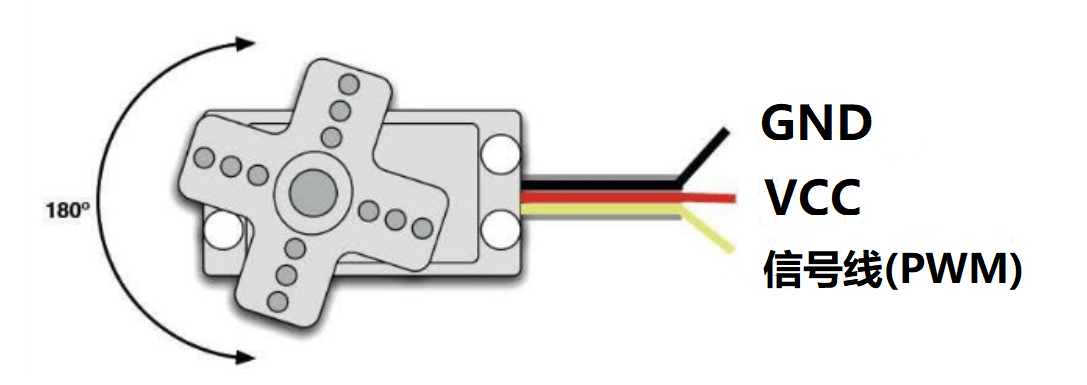
舵机通过3线(一般舵机的线序为信号,电源,地)控制,二维舵机云台用到的是20KG大扭矩PWM舵机。通常情况下:黑色表示GND,红色表示VCC,橙色(或白色)表示信号线。
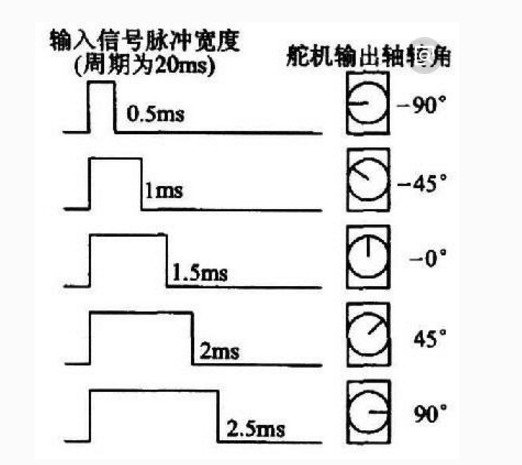
PWM舵机的控制一般需要一个周期20ms(频率50Hz)左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。下图以180°舵机为例(-90°到90°,可自行转换为0°-180°),说明了在固定PWM频率下通过不同的脉冲宽度信号即可控制舵机对应角度。对于270°舵机同理。
Servos对象
基于pyMotors方式控制PWM舵机的microppython驱动库已经封装好,位于servo.py和pca9685.py ,只需要在主函数初始化I2C2和调用即可。
构造函数
from servo import Servos
...
s=Servos(i2c, freq=50, min_us=500, max_us=2500, degrees=180)
构建16路舵机对象。
freq:PWM频率,默认为50Hz;min_us:最小脉冲宽度,默认500us,即上图的0.5ms;max_us:最大脉冲宽度,默认2500us,即上图的2.5ms;degrees:舵机角度,默认180°。(270°舵机初始化时赋值270即可)
使用方法
s.position(index, degrees=None)
设置某个舵机的位置。
index: 值为 0~15 ,表示16个舵机的编号;degrees: 舵机的角度;180°舵机值为 0~180,270°舵机值为 0~270.
编程思路如下:
参考代码
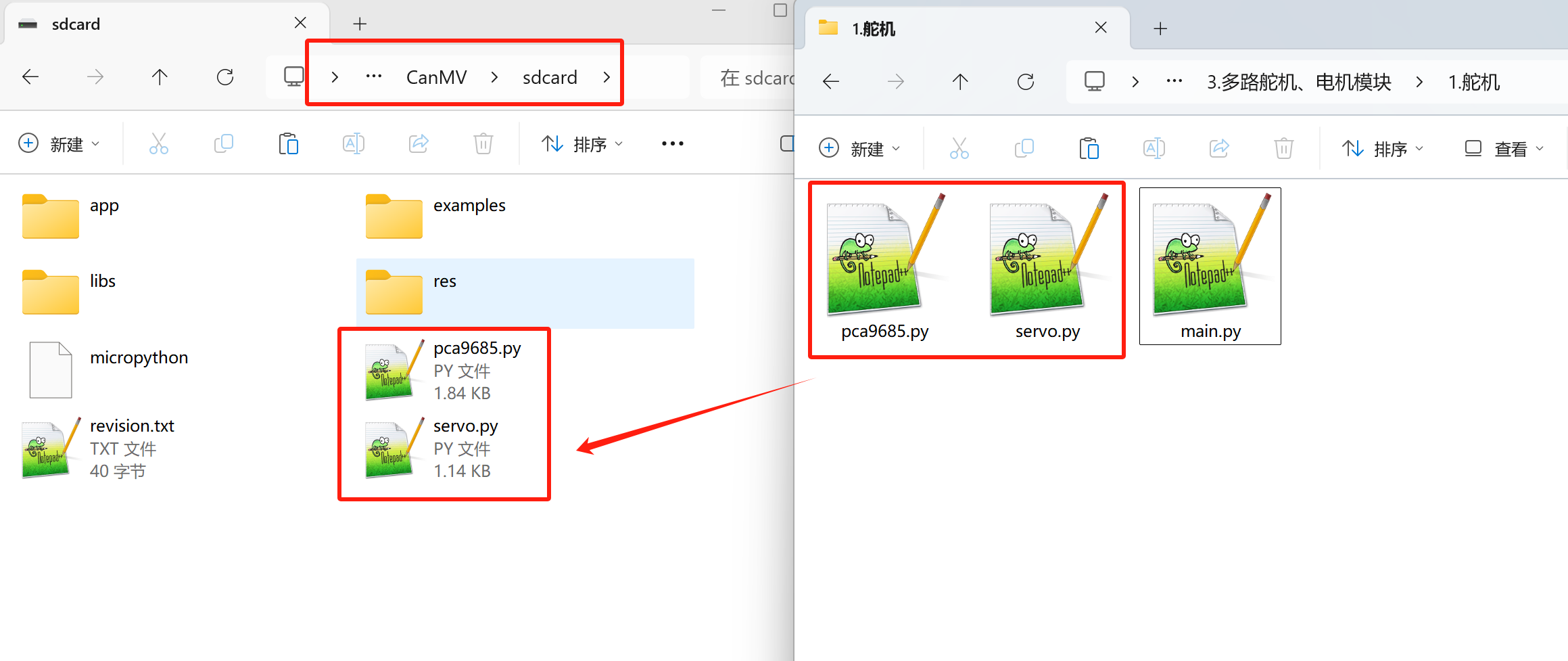
运行代码前需要将 servo.py和pca9685.py 文件发送到CanMV U盘 sdcard根目录。主程序 main.py 代码如下:
'''
# Copyright (c) [2025] [01Studio]. Licensed under the MIT License.
实验名称:二维舵机云台两路舵机控制
实验平台:01Studio CanMV K230 + 二维舵机云台(含pyMotors驱动板)
说明:控制二维舵机云台的两路舵机
'''
from machine import I2C,FPIOA
from servo import Servos
import time
#将GPIO11,12配置为I2C2功能
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.IIC2_SCL)
fpioa.set_function(12, FPIOA.IIC2_SDA)
i2c = I2C(2, freq=10000) #构建I2C对象,推荐频率小于10KHz
#构建二维云台2路舵机对象
servo_x=Servos(i2c,degrees=270) #水平(X轴)使用的是270°舵机
servo_y=Servos(i2c,degrees=180) #垂直(Y轴)使用的是180°舵机
#舵机对象使用用法, 详情参看servo.py文件
#s.position(index, degrees=None)
#index: 0~15表示16路舵机;
#degrees: 角度,0~180/270。
#初始位置,可以修改角度观察现象
servo_x.position(0,135) #水平(X轴)使用使用端口0,转到135°
servo_y.position(1,90) #垂直(Y轴)使用使用端口1,转到90°
while True:
pass
修改下面代码的135和90可以分别控制2路点击转动到不同的角度。
#初始位置,可以修改角度观察现象
servo_x.position(0,135) #水平(X轴)使用使用端口0,转到135°
servo_y.position(1,90) #垂直(Y轴)使用使用端口1,转到90°
实验结果
将资料包示例程序的库文件全部拷贝到CanMV U盘 sdcard根目录:
运行代码,可以看到舵机启动后转动到下面位置。(水平135°居中,垂直90°居中)
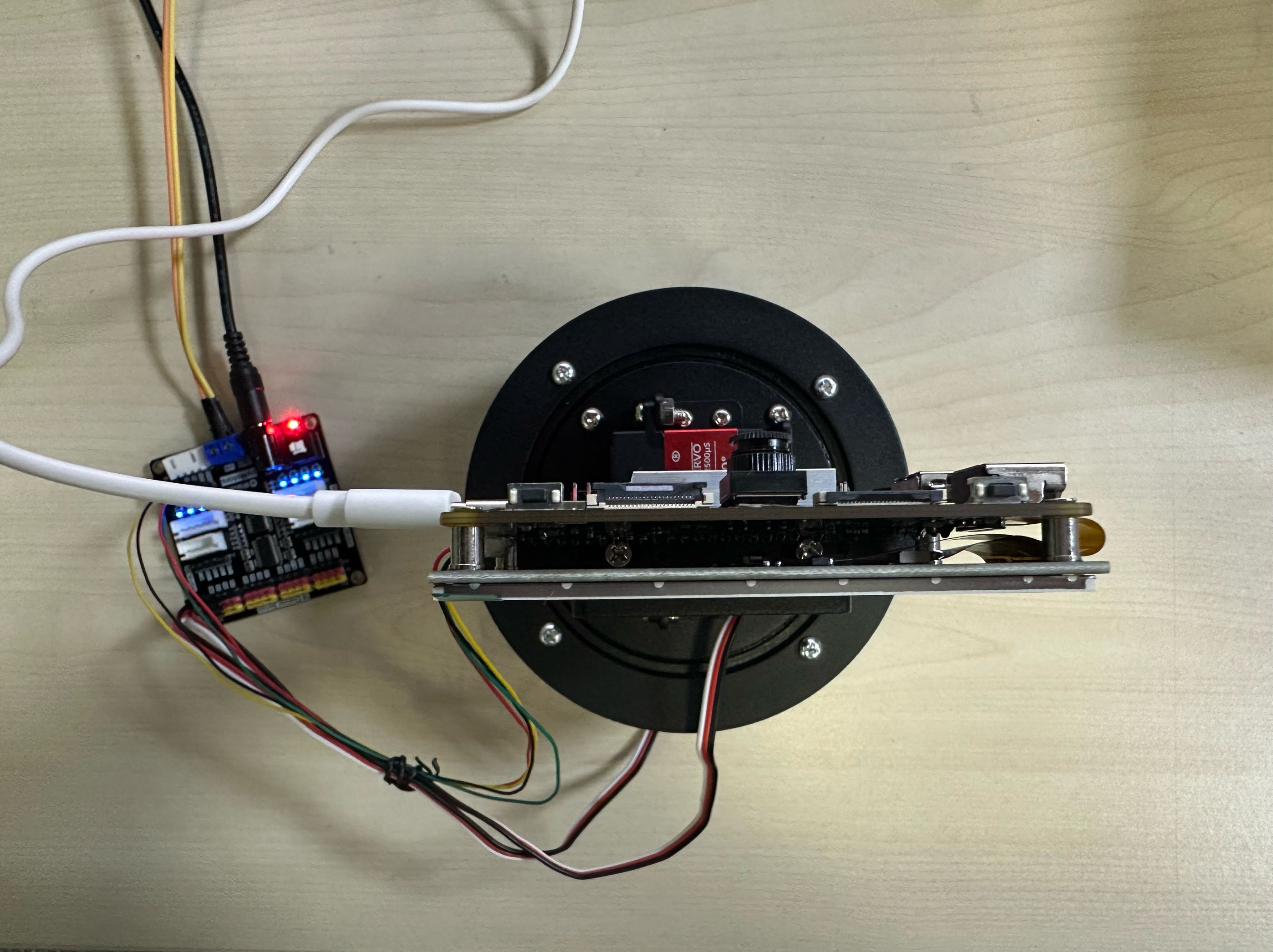
二维云台舵机工作时力度非常大,调试时候小心夹手!