摇杆(ADC)
前言
ADC(analog to digital conversion) 模拟数字转换。意思就是将模拟信号转化成数字信号,由于单片机只能识别二级制数字,所以外界模拟信号常常会通过ADC转换成其可以识别的数字信息。常见的应用就是将变化的电压转成数字信号实现对电压值测量。
pyDrone上带有锂电池电压测量电路,通过电压测量我们可以判断电池电量。
实验目的
通过编程调用MicroPython的内置ADC函数,实现摇杆原始电压值测量。
实验讲解
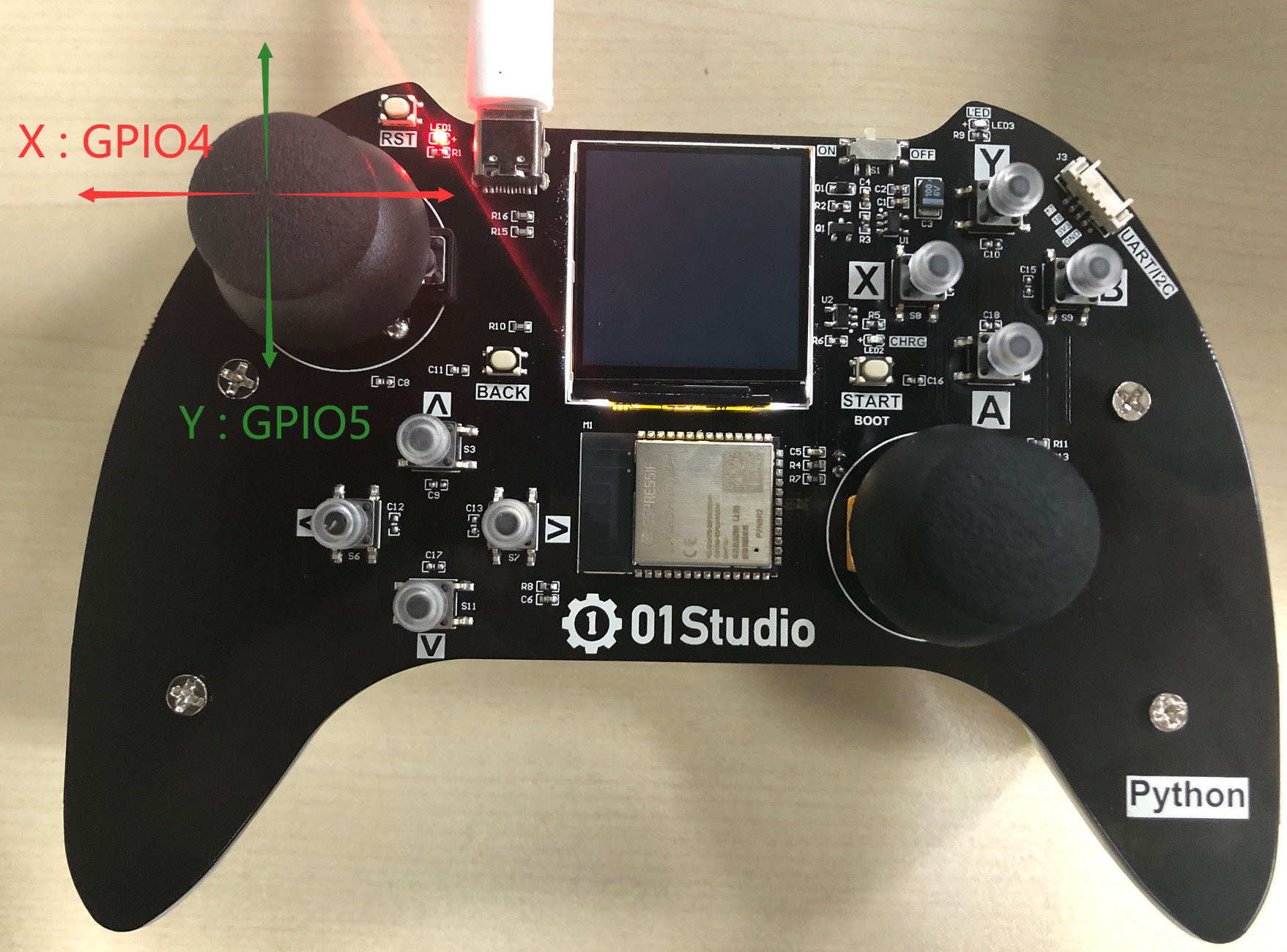
pyController有左右两路摇杆,本节以左边摇杆为例进行实现,我们先来看看原理图。
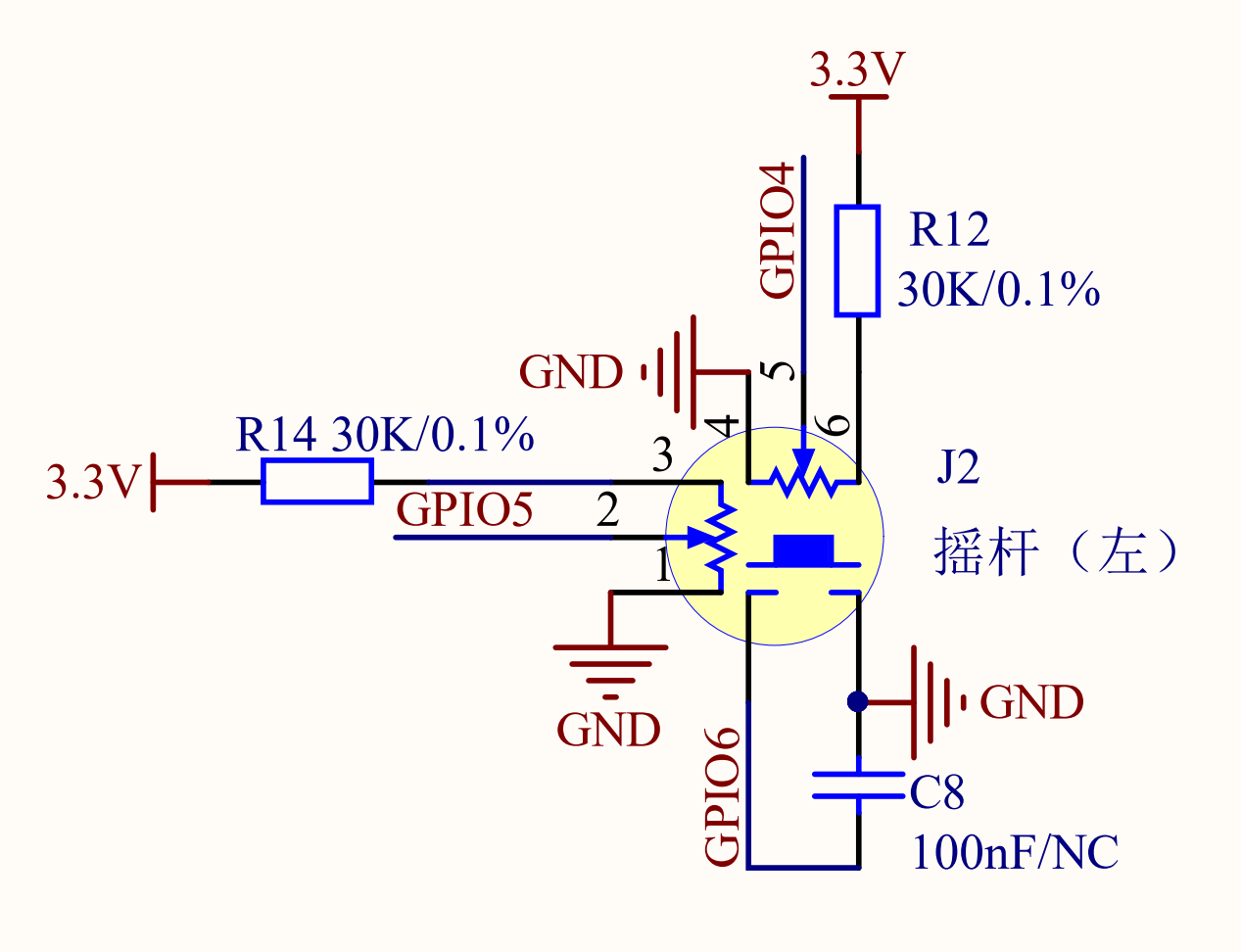
从上图可以看到摇杆的X/Y两个方向分别连接了GPIO4和GPIO5,摇杆的内置电阻是10K欧姆,串联了1个30K欧姆,使得实际测量电压为0~0.825V(3.3除以4),这是因为ESP32 ADC输入最大量程默认为1V。
实际上ESP32-S3主控通过对GPIO引脚的ADC值来判断摇杆的方向, ESP32-S3的ADC默认量程为0-1V(0-4095),我们来看看ADC模块的构造函数和使用方法。
ADC对象
构造函数
adc = machine.ADC(Pin(id))
构建ADC对象,ADC引脚对应如下:
Pin(id):支持ADC的Pin对象,如:Pin(2) 。
使用方法
adc.read()
获取ADC值,测量精度是12位,返回0-4095(对应电压0-1V)。
adc.atten(attenuation)
配置衰减器。配置衰减器能增加电压测量范围,以牺牲精度为代价的。
attenuation:衰减设置。ADC.ATTN_0DB:0dB衰减,最大测量电压1.00V。(默认配置)ADC.ATTN_2_5DB: 2.5dB 衰减, 最大输入电压约为 1.34v;ADC.ATTN_6DB:6dB 衰减, 最大输入电压约为 2.00v;ADC.ATTN_11DB:11dB 衰减, 最大输入电压约为3.3v
更多用法请阅读官方文档:
https://docs.micropython.org/en/latest/esp32/quickref.html#adc-analog-to-digital-conversion
你没看错,就这么简单,两句函数就可以获得ADC数值。我们将在本实验中让我们来理顺一下编程逻辑。先导入相关模块,然后初始化模块。在循环中不断读取摇杆X(GPIO4)和Y(GPIO5)的ADC值,转化成电压值后通过LCD显示,每隔300毫秒读取一次,代码编程流程图如下:
参考代码
'''
实验名称:摇杆(ADC)
版本:v1.0
日期:2022.4
作者:01Studio
说明:测量摇杆原始ADC值。
'''
#导入相关模块
from tftlcd import LCD15
from machine import Pin,ADC,Timer
#定义常用颜色
RED = (255,0,0)
GREEN = (0,255,0)
BLUE = (0,0,255)
BLACK = (0,0,0)
WHITE = (255,255,255)
########################
# 构建1.5寸LCD对象并初始化
########################
d = LCD15(portrait=1) #默认方向竖屏
#填充白色
d.fill(WHITE)
#摇杆ADC引脚初始化
adc_x = ADC(Pin(4))
adc_y = ADC(Pin(5))
def ADC_Test(tim):
#采集ADC值
v_x = adc_x.read()
v_y = adc_y.read()
#显示原始值
d.printStr('L-X: '+str(v_x)+' ',10,15,color=BLACK,size=2)
d.printStr('L-Y: '+str(v_y)+' ',10,45,color=BLACK,size=2)
#显示电压值
d.printStr('L-X: '+str('%.2f'%(v_x/4095))+'V ',10,115,color=BLACK,size=2)
d.printStr('L-Y: '+str('%.2f'%(v_y/4095))+'V ',10,145,color=BLACK,size=2)
#串口REPL打印
print('adc_x: ',v_x,str('%.2f'%(v_x/4095)))
print('adc_y: ',v_y,str('%.2f'%(v_y/4095)))
#开启定时器
tim = Timer(1)
tim.init(period=300, mode=Timer.PERIODIC, callback=ADC_Test) #周期300ms
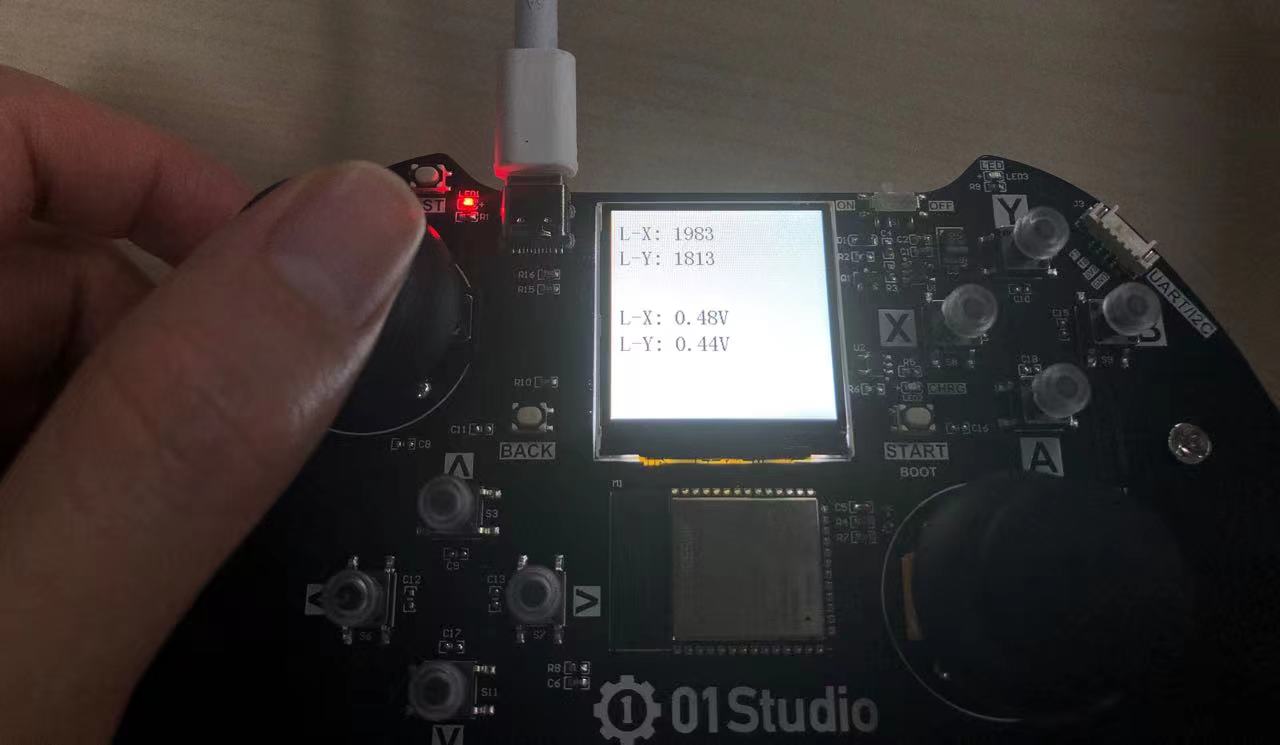
实验结果
运行代码,推动摇杆,可以看到LCD显示电压值数据的变化。
这一节我们学习了摇杆原始值的获取,主要是ADC的应用,通过ADC的变化,我们就可以实现一些线性功能的控制,比如油门加速。